Creuser encore davantage
17 Cartographie numérique des sols
Brandon Heung; Daniel Saurette; and Chuck Bulmer
OBJECTIFS D’APPRENTISSAGE
À la fin de ce chapitre, les étudiants devraient être capables de :
- Décrire et rationaliser la transition d’informations pédologiques conventionnelles en informations pédologiques numériques;
- Lier les théories de la pédogenèse aux applications de la cartographie numérique des sols; and
- 3. Fournir un aperçu de la manière dont les informations numériques sur les sols sont utilisées pour générer des cartes des sols.
INTRODUCTION
À l’échelle mondiale, le Canada possède les troisième et septième plus grandes ressources de terres forestières et arables, respectivement; par conséquent, des informations exactes et précises sur les sols sont nécessaires pour maintenir et améliorer nos ressources en sols et pour relever certains défis environnementaux majeurs, tels que la déprise agricole ou encore la perte de carbone organique et la détérioration de la santé des sols. Sans informations sur les patrons de distribution spatiale des sols, notre capacité à identifier les emplacements les plus appropriés pour réaliser de nouvelles opportunités agricoles et de gestion des ressources, et à capitaliser sur nos ressources naturelles sera mise à l’épreuve dans le futur.
La demande d’informations sur les sols a augmenté pour répondre aux problèmes environnementaux émergents tels que la production alimentaire durable; la réglementation, l’adaptation et l’atténuation des changements climatiques; la dégradation des sols; la gestion des ressources foncières; et la fourniture de services écosystémiques dans toutes les étendues géographiques (Sanchez et al., 2009 ; FAO et Partenariat mondial sur les sols, 2016). De plus, de meilleures informations sur les sols sont nécessaires pour effectuer leurs évaluations et pouvoir informer sur les risques lors de prises de décisions (Carré et al., 2007 ; Finke, 2012 ; Arrouays et al., 2014).
Le Canada a une longue histoire d’arpentage des sols – le premier ayant été réalisé en Ontario en 1914 (McKeague et Stobbe, 1978) – et les cartes produites à partir de ces arpentages dont nous avons hérité ont été utilisées pour orienter les politiques de gestion et de planification des terres pendant de nombreuses années. Les versions numérisées des anciennes cartes sont largement disponibles en ligne et sont encore utilisées à ce jour (par exemple, le British Columbia’s Soil Information Finder Tool de la Colombie-Britannique). Malgré cela, la communauté des sciences du sol reconnait que les approches et les techniques utilisées dans l’étude des sols à cette époque peuvent ne pas convenir pour fournir les informations précises et à haute résolution exigées par les activités modernes de gestion agricole et d’évaluation environnementale. Avec les progrès continus de l’informatique, des technologies de télédétection et de détection proximale, et des systèmes d’information géographique (SIG), les activités d’arpentage des sols se sont transformées en techniques numériques qui peuvent fournir de manière efficace des informations sur les sols plus exactes et précises que ce qui était auparavant disponible.
Ce chapitre résumera la transition des approches conventionnelles d’arpentage des sols vers les approches de cartographie numérique des sols (CNS); présentera un cadre théorique de la CNS; et donnera un aperçu de la façon dont les technologies émergentes peuvent être utilisées pour générer des cartes numériques des sols.
CARTOGRAPHIE CONVENTIONNELLE DES SOLS
TDeux réalisations majeures ont contribué au développement des méthodes conventionnelles d’étude des sols en Amérique du Nord. La première réalisation a été la formalisation de Hans Jenny dans Les Facteurs de Formation des Sols (1941) (Factors of Soil Formation) et la seconde a été la formalisation des systèmes taxonomiques nationaux des sols aux États-Unis (Soil Taxonomy; Soil Survey Staff, 1975) et au Canada (The Canadian System of Soil Classification, CSSC ; Canada Soil Survey Committee, 1978 ; voir le chapitre 8). Les systèmes de classification décrivaient comment les sols étaient classés en fonction de propriétés morphologiques facilement mesurables et quantifiables sur le terrain. Le modèle clorpt de Jenny (Eqn. 1) caractérise les conditions environnementales pour lesquelles les sols sont trouvés en fonction du climat (cl), des organismes (o), du relief (r), du matériau parental (p), du temps (t) et d’autres facteurs locaux qui influencent les sols (…) :
(1) 
Le modèle clorpt a été proposé à l’origine comme méthode pour étudier comment les sols variaient, quantitativement, en fonction de divers facteurs d’état. L’une des citations clés qui est négligée dans le livre de Jenny est:
« Les facteurs ne sont pas des formateurs, ou des créateurs, ou des forces; ce sont des variables qui définissent l’état d’un système de sol. »
En d’autres termes, ces facteurs décrivent simplement les conditions environnementales dans lesquelles un sol (et leurs propriétés) se trouve et, par conséquent, ces variables peuvent être utilisées comme base pour prédire les sols à l’aide d’un modèle qui relie le sol à l’environnement (c’est-à-dire, un modèle sol-environnement).
L’adoption du modèle clorpt de Jenny a conduit à des améliorations spectaculaires dans l’étude des sols par rapport aux premiers efforts. Les descriptions et les cartes des sols ont commencé à s’organiser autour des facteurs de formation des sols, notamment en organisant les sols en groupes selon les propriétés de leur matériau d’origine, mais aussi en liant la variation topographique à petite échelle aux délimitations entre les sols. Cela a fourni une justification et un système pour relier les limites des unités pédologiques aux caractéristiques topographiques.
Les systèmes de classification des sols ont également permis l’amélioration de l’étude des sols, car ils se sont concentrés sur les propriétés du sol les plus importantes à évaluer sur le terrain, et ceci de manière cohérente sur plusieurs projets d’étude, permettant une meilleure corrélation sur de vastes zones.
Les améliorations conceptuelles associées au modèle clorpt et l’utilisation d’informations normalisées sur les profils du sol, provenant de l’application d’un système uniforme de classification des sols, ont grandement contribué à fournir ce que nous considérons aujourd’hui comme de l’information de grande qualité provenant des études pédologiques de cette dernière moitié du 20ème siècle. La numérisation de ces relevés a fourni des informations précieuses aux gestionnaires des terres et, dans certains cas, elle a également fourni la matière première au développement des cartes numériques des sols actuelles. Cela n’aurait pas été possible sans ces avancées.
Représentations conventionnelles du sol
Les sols peuvent être représentés de plusieurs manières: un profil, pédon, polypédon, ou une unité cartographique (Figure 17.1). Le profil du sol est une représentation bidimensionnelle et le pédon une représentation tridimensionnelle qui mesure généralement 1 à 3 m latéralement et 1 à 2 m verticalement. En principe, les propriétés du pédon ne doivent pas varier horizontalement (uniquement verticalement) et lorsque plusieurs pédons similaires sont connectés, on parle de polypédon. Le concept de polypédon diffère d’une unité cartographique cette dernière, un polygone distinct cartographié par des géomètres, est une représentation surfacique d’un polypédon ou d’un complexe de polypédons. Il existe deux types d’unités cartographiques: les consociations et associations. Les consociations sont des unités cartographiques délimitées sur la base d’une seule unité ou série taxonomique et peuvent être appelées une unité cartographique simple, tandis que les associations consistent en deux ou plusieurs taxons de sol dissemblables (composants multiples) qui se produisent dans un modèle trop complexe pour être résolu à l’échelle cartographique choisie (Hole et Campbell, 1985 ; Schaetzl et Anderson, 2005). Dans le cas d’unités cartographiques complexes, la proportion de chaque classe de sol dans l’unité cartographique est spécifiée dans la légende de la carte ou le symbole cartographique.
Produire des cartes pédologiques conventionnelles
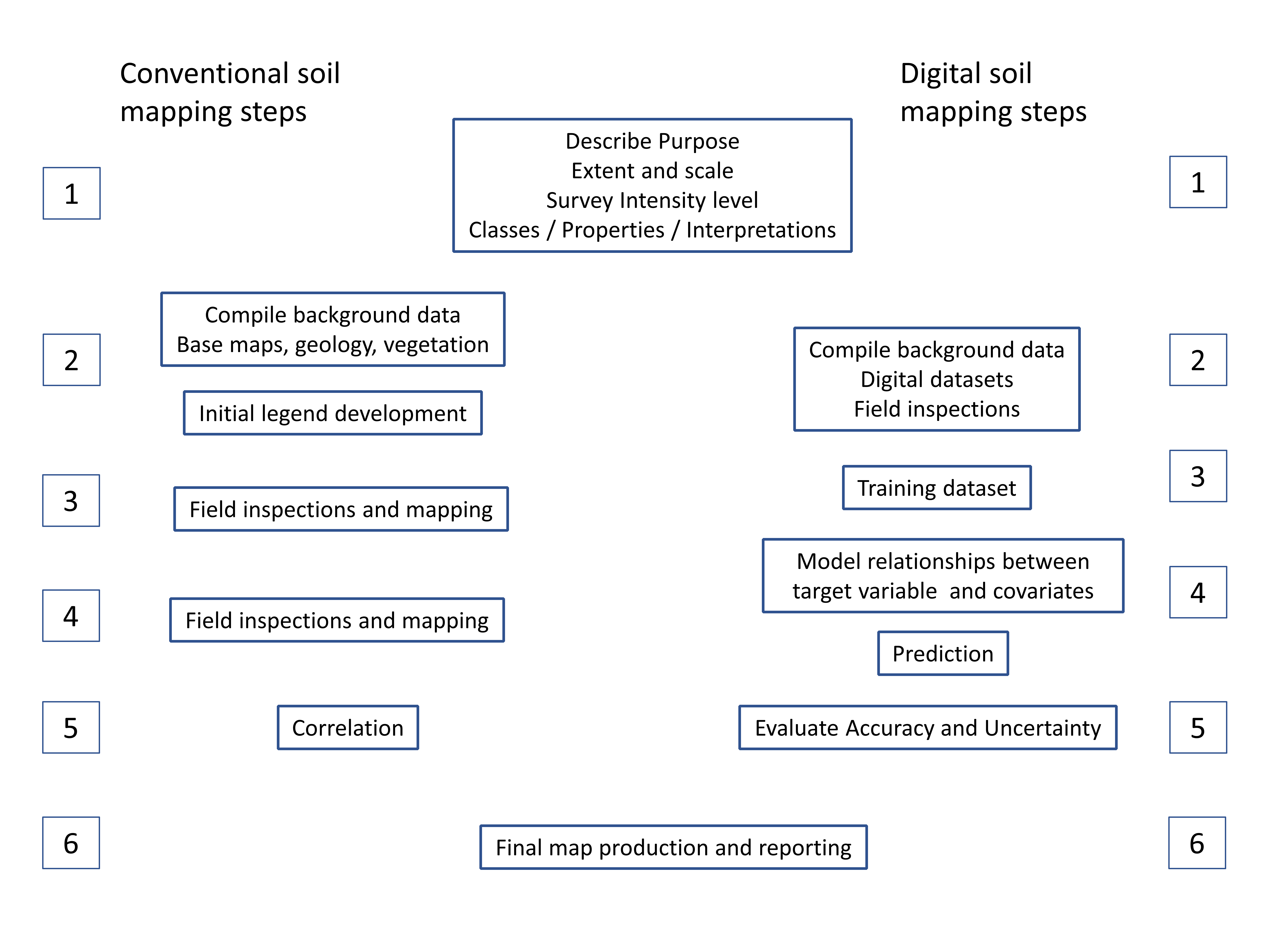
MacMillan et al. (1992) ont décrit les étapes impliquées dans la réalisation d’une carte pédologique conventionnelle, en commençant par les étapes préliminaires de définition des objectifs, de compilation des informations de base et de développement initial de la légende. Les étapes préliminaires (réalisées principalement au bureau) sont suivies d’inspections du sol, d’une cartographie sur le terrain et d’une corrélation. Enfin, la carte est produite et un rapport rédigé. Les procédures utilisées pour produire des cartes pédologiques ont été largement documentées pendant la période où ces cartes étaient produites dans de nombreux pays à travers le monde. Au Canada, les procédures et considérations pour atteindre les objectifs de cartographie des sols ont été documentées dans Mapping Systems Working Group (1981) et Coen (1987).
Dans une enquête conventionnelle, un aspect clé de la planification consiste à établir le niveau d’intensité du relevé, qui exprime la quantité de travail de terrain effectuée et le niveau de détail des informations collectées. Des lignes directrices pour décrire le niveau d’intensité des relevés sont fournies au tableau 17.1 (Mapping Systems Working Group 1981; Coen, 1987).
Table 17.1. Guide du niveau d’intensité des relevés des sols adapté de Mapping Systems Working Group (1981)
| Niveau d’Intensité du Relevé (NIR) | Nom commun | Intensité sur le terrain | Méthode de vérification sur le terrain | Échelle de publication typique | Niveau taxonomique |
|---|---|---|---|---|---|
| 1 | Très détaillé | 1 inspection par polygone | Traversée à pieds <0.5 de distance | 1:5,000 | Séries |
| 2 | Détaillé | 1 inspection dans >90% des polygones | Traversée à pieds/en véhicule à 2 km de distance | 1:20,000 | Série ou famille |
| 3 | Reconnaissance | 1 inspection dans 60-80% des polygones | Traversée à pieds/en véhicule à 4 km de distance | 1:50,000 | Série, famille ou sous-groupe |
| 4 | Vaste Reconnaissance | 1 inspection dans 30-60%des polygones | Traversée en véhicule/hélicoptère à 8 km de distance | 1:100,000 | Famille ou sous-groupe |
| 5 | Exploratoire | 1 inspection dans <30% des polygones | Traversée en véhicule/hélicoptère à 10 km de distance | 1:250,000 | Sous-groupe, grand groupe ou ordre |
Dans le tableau 17.1, un diagramme conceptuel du processus d’étude des sols est présenté, où les données environnementales et les inspections sur le terrain sont incorporées dans les modèles pédo-paysagers et utilisées pour préparer une carte pédologique conventionnelle. Le modèle pédo-paysager est une caractéristique clé de l’étude pédologique conventionnelle: il s’agissait de modèles mentaux, qui permettaient aux géomètres d’étendre les informations issues des inspections sur le terrain dans une zone à d’autres zones présentant des caractéristiques environnementales similaires, améliorant considérablement la production de cartes à un moment où l’accès aux réseaux était plus limité qu’aujourd’hui.
Les photographies aériennes, lorsqu’elles sont devenues largement disponibles, ont joué un rôle important dans le processus. Dans une étude de sol conventionnelle, le cartographe examinait d’abord les informations et les connaissances existantes sur les relations sol-environnement de la région. Des photographies aériennes étaient ensuite examinées afin d’identifier les patrons de variation topographique et de végétation, où les variables sol-environnement présentaient une expression externe sur le paysage afin de tenter de corréler des caractéristiques du paysage aux limites de distribution des sols (relations sol-paysage). Les photos aériennes ont commencé à être amplement utilisées pendant et après les années 1960, et l’interprétation des photos aériennes a été réalisée à l’aide d’un stéréoscope, ce qui permet au cartographe de voir le paysage en 3D, ce qui augmente considérablement la qualité des cartes pédologiques produites. Encore une fois, en se référant au modèle clorpt de Jenny (1941), l’hypothèse sous-jacente était que les zones ayant des caractéristiques pédo-environnementales similaires devraient avoir des sols similaires. Une carte de reconnaissance préliminaire était développée en traçant les limites entre les unités de sol, et cette carte préliminaire était ensuite testée sur le terrain où une classification morphologique était effectuée sur les unités de carte préliminaire et liée à une unité taxonomique de sol (par exemple, une série). Lorsque les séries étaient identifiées, le cartographe tentait de délimiter davantage ou d’ajuster les limites de l’unité cartographique en fonction de l’endroit où le taux de changement des propriétés du sol était le plus élevé et de délimiter des zones relativement uniformes dans les unités cartographiques.
Complétées par des données de terrain et des descriptions de profils, les unités cartographiques présentant des caractéristiques morphologiques similaires étaient regroupées dans la même unité taxonomique (par exemple, des séries); les propriétés et la gamme de conditions environnementales des sols étaient ensuite décrites dans la légende. Des relevés de sol conventionnels étaient produits à différents niveaux d’intensité, reflétant la quantité de détails voulant être présentée et l’échelle de la carte (tableau 17.1, figure 17.2). De grandes parties du Canada ont été cartographiées de cette façon, fournissant des informations essentielles pour le développement de l’agriculture et des ressources naturelles.
L’évolution des cartes pédologiques conventionnelles
La plupart des cartes pédologiques conventionnelles qui ont été produites au Canada jusqu’aux années 1990 ont été préparées à des fins d’inventaire des terres et de planification régionale (cartes « semi-détaillées »), et ont été produites à l’aide de techniques cartographiques analogiques (c.-à-d. carte sur papier). Elles présentent de ce fait certaines limites par rapport aux besoins actuels de produits à haute résolution. La représentation cartographique chloropléthique utilisée pour présenter les informations pédologiques sur des cartes en papier ainsi que l’absence de technologies permettant à l’époque d’acquérir et de traiter des données numériques maillées sur le sol et le terrain sont deux aspects clés de ces limitations.
Premièrement, les données d’une carte chloropléthique sont représentées sous forme de classes discrètes où les conditions sont supposées être homogènes au sein de l’unité cartographique (Hole, 1978). En outre, il est également reconnu qu’une quantité importante de généralisation spatiale (c’est-à-dire une simplification) au sein des unités cartographiques a lieu à cause de l’inclusion de sols sous-dominants qui sont trop restreints pour être cartographiés à l’échelle cartographique (Hole and Campbell, 1985). Par conséquent, la pureté des unités cartographiques est étroitement liée à la complexité du terrain, à l’expression externe des délimitations, au niveau d’intensité du relevé et à l’échelle cartographique (Beckett, 1971). Bien qu’il soit idéal d’avoir une carte pédologique composée uniquement d’unités cartographiques simples, il a été démontré que l’augmentation de la proportion d’unités cartographiques “pures” dans une carte entraîne une augmentation exponentielle de son coût de développement (Bie et al., 1973).
D’autres problèmes peuvent être liés à l’imprécision des limites des unités cartographiques où la variabilité (ou son absence) à la surface du sol ne coïncide pas nécessairement avec la variabilité qui peut se produire en profondeur (Hole, 1978). De plus, les changements dans le sol ne sont pas nécessairement discrets (comme le suggère l’utilisation des limites), mais plutôt continus lorsque les attributs du sol entre deux unités cartographiques voisines sont intermédiaires aux propriétés du sol des deux unités (Zhu et Band, 1994 ; Schaetzl et Anderson, 2005).
Le dernier ensemble de défis découle de la délimitation des unités cartographiques sur la base des modèles mentaux des relations sol-environnement qui ont été développés principalement pour coïncider avec les objectifs spécifiques d’un produit cartographique sur une zone donnée. Ces objectifs variaient d’une carte à l’autre, et bien qu’ils aient normalement été décrits dans le rapport de relevé, ils conviennent rarement pour être incorporés dans des évaluations des sols informatisées couvrant de vastes zones incluant plusieurs relevés plus petits. Par conséquent, des incohérences se sont manifestées dans les cartes pédologiques comme des différences de délimitations des unités cartographiques entre les différents comtés, états/provinces et pays (Figure 17.3 ; Thompson et al., 2012 ; Dewitte et al., 2013). De plus, les incohérences peuvent également entraîner des problèmes tels que la présence de plusieurs séries de sols ayant les mêmes propriétés pédologiques, ce qui entraîne une redondance, ou pire encore, des cas où deux séries de sols portant le même nom ont des propriétés complètement différentes (Thompson et al., 2012).
Malgré ces limites, dans de nombreuses régions du Canada et du monde, les anciennes cartes des sols contiennent de grandes quantités d’informations dérivées d’inspections sur le terrain et des connaissances des pédologues. Pour ces raisons, elles représentent une source importante de données pour le développement de cartes numériques des sols qui répondent aux besoins actuels.
CARTOGRAPHIE NUMÉRIQUE DES SOLS
L’arpentage des sols, en tant que pratique, a évolué en tirant parti des progrès de la technologie informatique (Minasny et McBratney, 2016; Rossiter, 2018), des technologies de télédétection (Mulder et al., 2011), des technologies de détection proximale (Viscarra Rossel et al., 2011), des Systèmes d’Information Géographique (SIG), des techniques d’apprentissage automatique (Heung et al., 2016) et de la disponibilité croissante d’ensembles de données géospatiales (McBratney et al., 2003 ; Minasny et McBratney, 2016 ; Scull et al., 2003 ). Par conséquent, la pédométrie—une branche de la science du sol qui applique “des méthodes mathématiques et statistiques pour l’étude de la distribution et de la genèse des sols” (Webster, 1994) – est un domaine de recherche émergent à l’échelle mondiale. Bien que les techniques pédométriques pour produire des cartes numériques des sols existent depuis les années 1970 (ex. Webster et Burrough, 1972a, 1972b), les progrès technologiques ont facilité la production de CNS depuis les années 2000 (McBratney et al., 2003 ; Scull et al., 2003 ; Minasny et McBratney, 2016). Ces avancées ont également permis de produire des cartes pédologiques pour des zones de plus en plus grandes et avec des niveaux de détail croissants (Minasny et McBratney, 2016).
SCertaines des principales réalisations des pédométristes du monde entier comprennent, mais sans s’y limiter, la création de GlobalSoilMap.net, une organisation internationale qui vise à coordonner et à produire des cartes numériques des sols à l’échelle mondiale; et la création de SoilGrids.org, une organisation qui a été la première à développer une suite de produits cartographiques à l’échelle mondiale. Au Canada, il s’agit toujours d’un domaine de recherche émergent et en évolution dans les secteurs de l’agriculture, de la foresterie et de l’environnement depuis 2010. Avec beaucoup de succès, la communauté de chercheurs travaillant en CNS a fourni des informations précieuses à plusieurs échelles spatiales à diverses parties prenantes, y compris les propriétaires fonciers, les agriculteurs, les gouvernements et les gestionnaires forestiers.
Les étapes de production des cartes numériques des sols (d’après Kienast-Brown et al. 2017) sont comparées à celles des cartes conventionnelles de la figure 17.4. Les deux méthodes d’élaboration de cartes partagent plusieurs étapes communes, en particulier la nécessité d’inspections détaillées sur le terrain et la capacité de décrire et d’interpréter correctement les données du profil du sol. Pour les cartes numériques des sols, les spécifications du contenu de l’information et du niveau de détail sont définies par la résolution spatiale cible, où le niveau de détail est déduit, et à l’étape des données d’apprentissage, où les attributs modélisés sont définis. Certaines organisations ont élaboré des spécifications cartographiques pour la production de cartes numériques des sols (par exemple, la FAO et le Groupe technique intergouvernemental sur les sols, 2018).
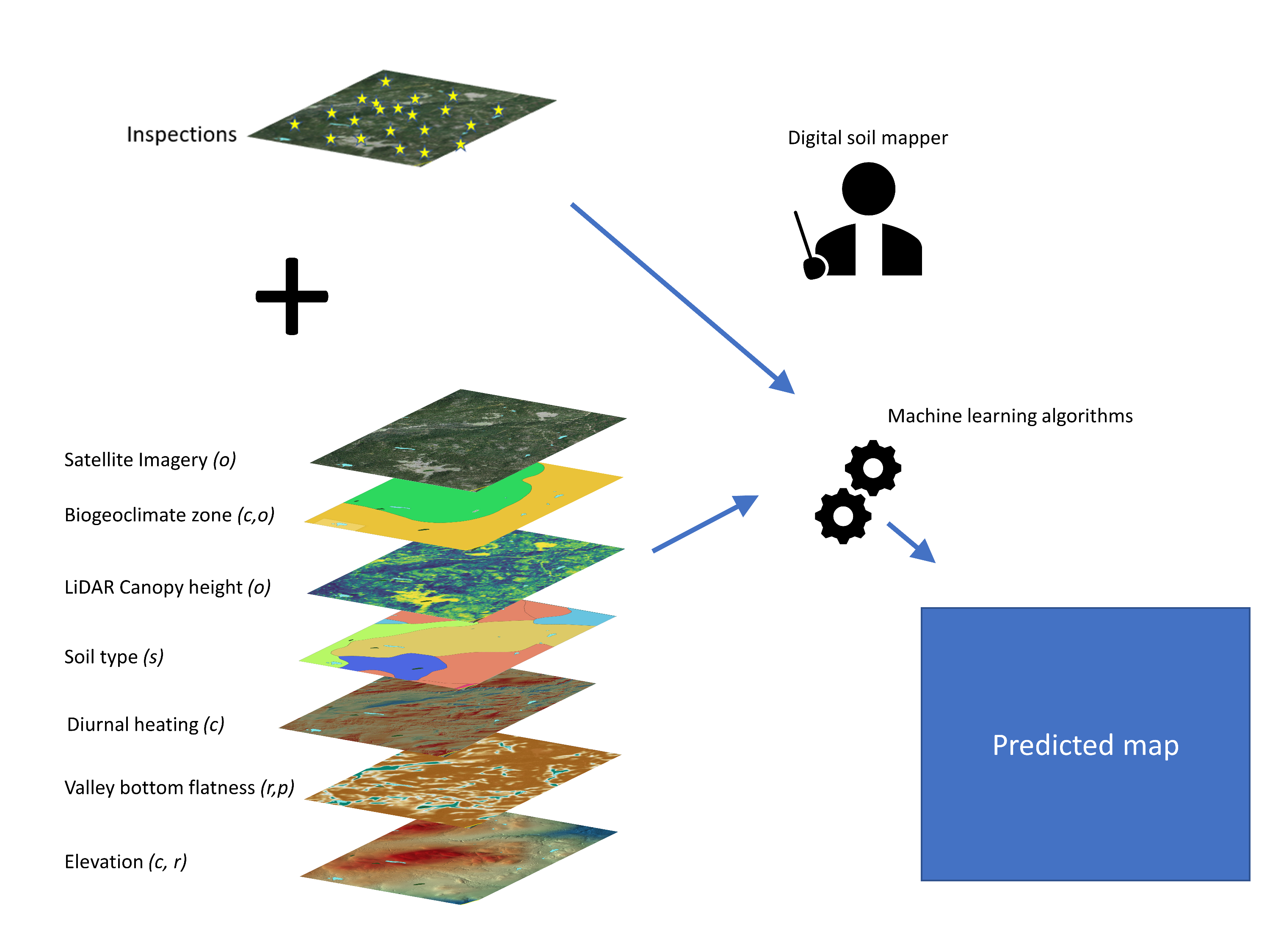
Les cartographies conventionnelle et numérique des sols diffèrent principalement dans la manière dont les classes de sols ou les valeurs d’attributs sont assignés aux emplacements. Dans la cartographie conventionnelle, une combinaison d’inspection sur le terrain, d’extrapolation et de connaissances d’experts est utilisée, tandis que dans la cartographie numérique, des informations de terrain et des modèles d’inférence quantitative sont utilisés pour prédire les conditions du sol à des endroits donnés. Le cadre conceptuel de la CNS, présenté à la figure 17.5, met en évidence le rôle que jouent les algorithmes d’apprentissage automatique dans la production d’une carte numérique des sols. Les données d’inspection sur le terrain sont d’une importance cruciale dans les approches conventionnelle et numérique de cartographie des sols. La CNS ne supprime pas le besoin de pédologues et de géomètres formés; la principale différence réside dans la manière dont les données de terrain sont utilisées pour construire les cartes des sols.
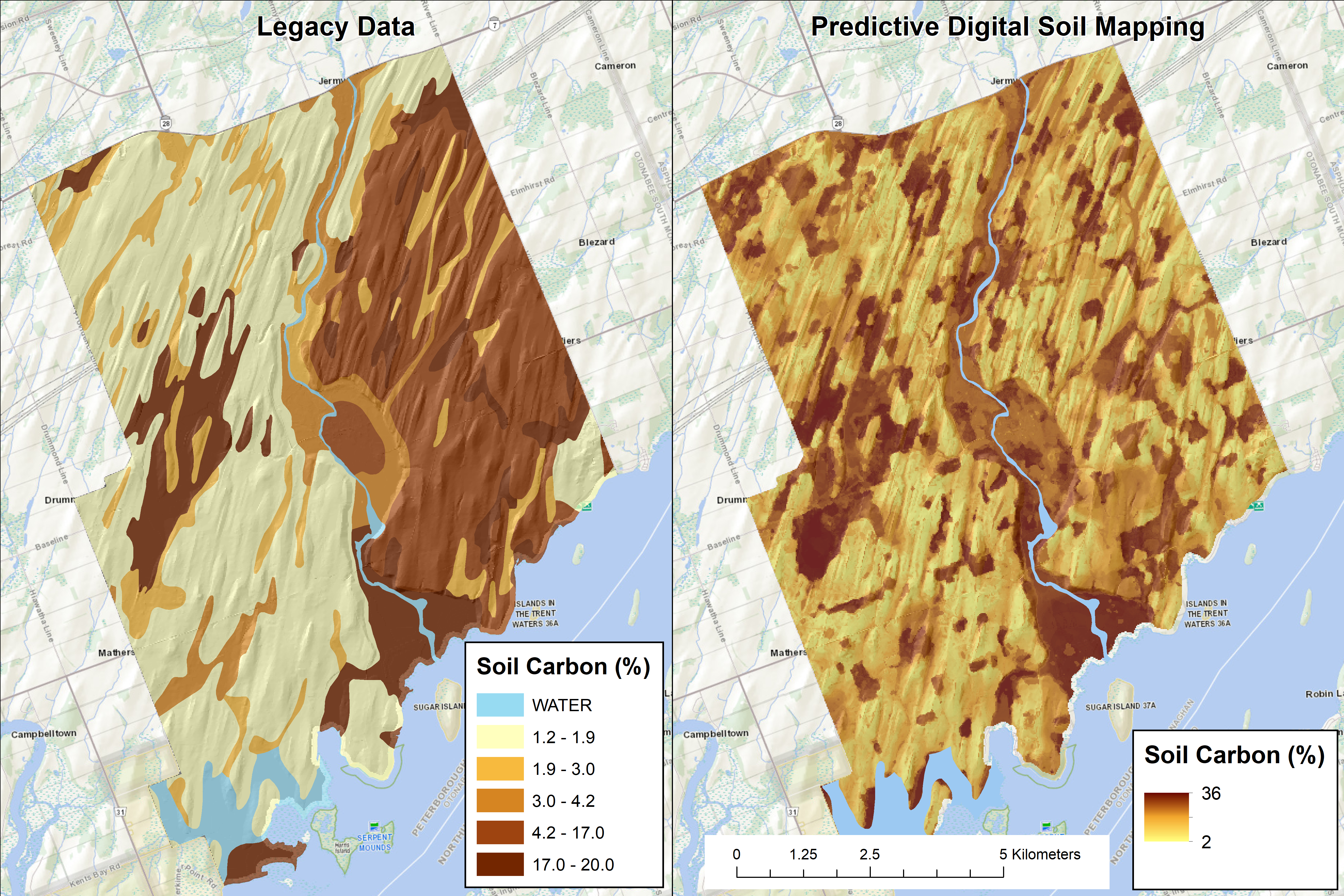
Il est important de reconnaître que, alors que les cartes pédologiques conventionnelles représentent des unités cartographiques pédologiques utilisant des polygones, la CNS vise à produire des cartes à l’aide d’une représentation matricielle. Les données raster consistent en une grille de cellules bidimensionnelles (c’est-à-dire des pixels), dans laquelle chaque cellule a un emplacement géographique (par exemple, longitude et latitude) et une valeur correspondante pour une variable donnée. La figure 17.6 montre une comparaison entre une carte pédologique conventionnelle représentée avec des polygones et une carte pédologique numérique représentée au format raster. Dans la CNS, les données raster peuvent représenter des attributs de sol (par exemple, le pH du sol), une classe de sol (par exemple, une classe de drainage) ou l’un des facteurs environnementaux utilisés pour effectuer des prédictions spatiales des sols.
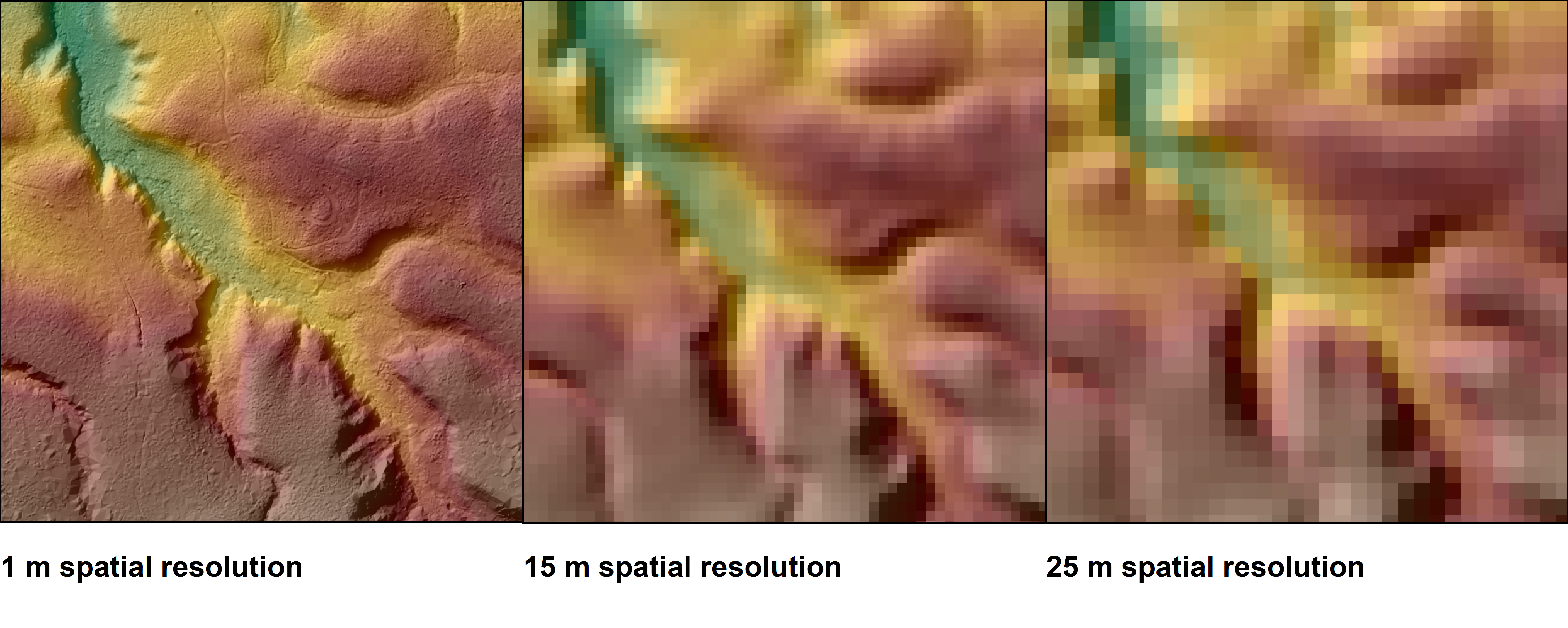
Le concept de résolution spatiale; est essentiel à la représentation des données raster; c’est-à-dire la dimension de chaque cellule par rapport à la zone qu’elle représente au sol. Par exemple, une résolution spatiale de 10 m indique que chaque cellule ou pixel de la grille représente une zone de 10 × 10 m au sol. En fin de compte, la résolution spatiale déterminera le niveau de détail ou de précision d’une carte pédologique et de ses utilisations. Par exemple, une carte à résolution fine ou élevée (par exemple, une résolution spatiale de 5 à 10 m) peut être plus utile pour représenter la variabilité du sol de champs agricoles individuels en agriculture de précision, tandis qu’une carte à résolution grossière ou basse (par exemple, 250 –1 000 m de résolution spatiale) peut être plus pratique pour représenter la variabilité des sols à l’échelle mondiale et l’intégration de ces données dans les modèles climatiques mondiaux. Par conséquent, lors de la sélection d’une résolution spatiale appropriée, un cartographe des sols doit tenir compte de l’utilisation qui sera faite de cette carte et de la résolution spatiale des données d’entrée nécessaires pour générer cette carte.
Bien sûr, il existe également un compromis entre la résolution spatiale et la taille des données, les cartes à haute résolution étant plus lourdes que les cartes à résolution inférieure. Par exemple, lorsque la résolution spatiale est augmentée d’un facteur deux (par exemple, en diminuant la taille de cellule de 10 × 10 m à 5 × 5 m), la taille de l’ensemble des données peut être augmentée d’un facteur de quatre parce que quatre pixels sont maintenant nécessaires pour représenter la même zone que le pixel d’origine. La figure 17.7 montre la relation entre la résolution spatiale et le détail des données topographiques.
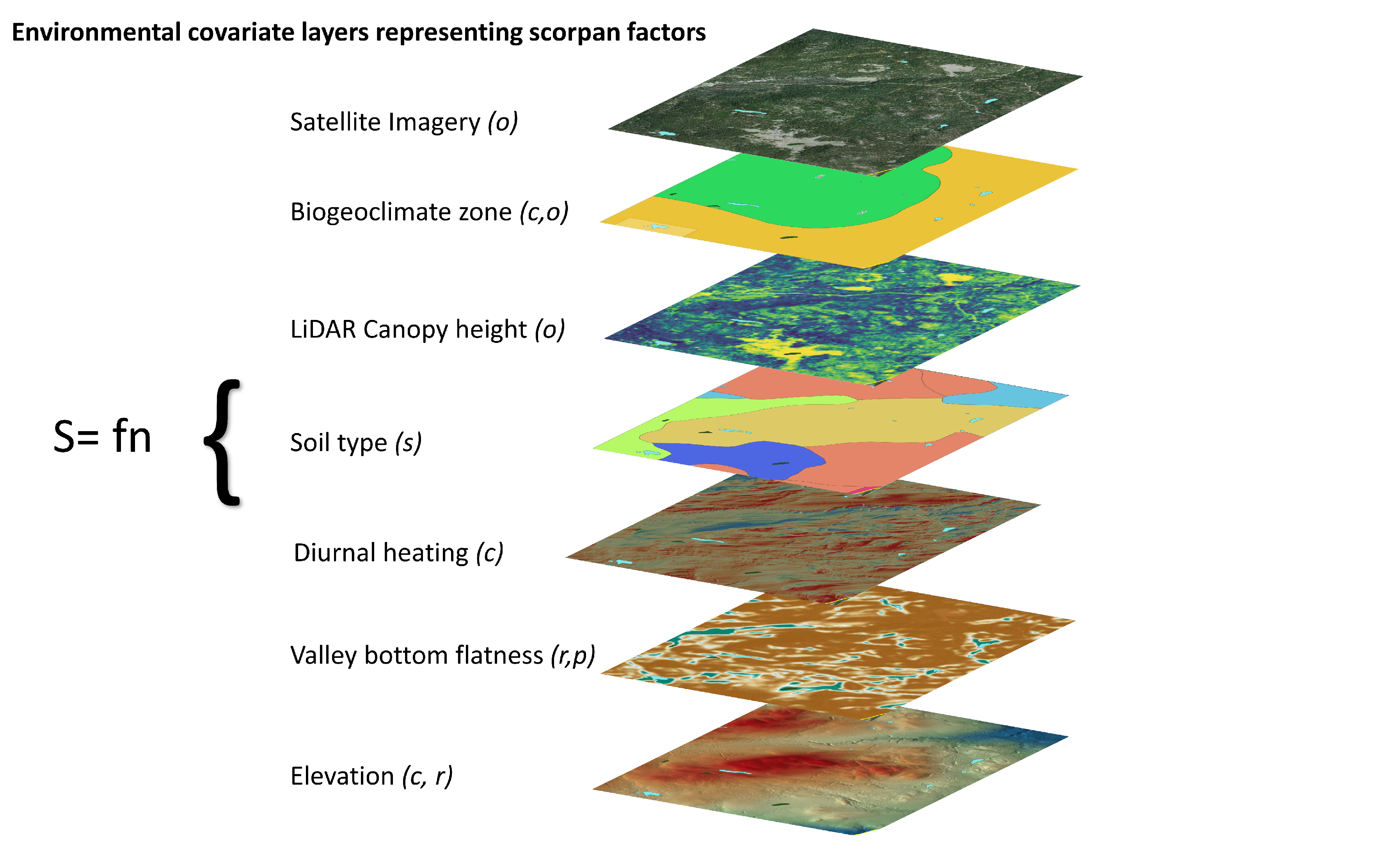
Le Modèle scorpan
Malgré son utilisation très répandue, le modèle clorpt de Jenny (1941) est en grande partie un modèle conceptuel; cependant, si l’on se réfère à sa citation, il faut rappeler que les facteurs de clorpt sont des variables qui décrivent l’environnement. Pour appliquer des approches numériques, nous devons reconnaître que ces facteurs peuvent également être représentés à l’aide d’un SIG — un système informatisé capable d’acquérir, de stocker, d’analyser et de visualiser des données spatiales. Pour effectuer pleinement la transition théorique des approches conventionnelles de CNS, McBratney et al. (2003) ont proposé le modèle scorpan comme une extension du modèle clorpt :
(2) 
Le modèle scorpan partage les mêmes variables que le modèle clorpt, qui comprend le climat (c), les organismes (o), le relief (r), le matériau parental (p) et le temps/âge (a). Les variables supplémentaires sont : s, qui représente les propriétés intrinsèques du sol (par exemple, les propriétés spectrales du sol) qui peuvent être capturées par divers capteurs distants et proximaux ; et n, qui représente les coordonnées spatiales d’un échantillon ou son emplacement par rapport à un autre phénomène géographique (par exemple, la distance à la rivière). Ici, les facteurs individuels scorpan, ou une combinaison de ceux-ci, sont utilisés pour prédire la distribution d’une propriété de sol ou d’une classe de sol S d’intérêt, à l’aide d’une fonction quantitative, f (), qui représente la relation sol-environnement.
Représentation des facteurs scorpan
L’efficacité du modèle scorpan réside dans sa flexibilité pour intégrer des données provenant d’enquêtes pédologiques existantes et d’ensembles de données géospatiales acquises à partir de plusieurs sources, telles que des données de télédétection, des données numériques d’altitude, des données climatiques, des données sur l’utilisation des terres et des données géologiques (McKenzie et Ryan, 1999). Ces facteurs scorpan sont représentés au format raster et, par conséquent, chaque jeu de données a également une résolution spatiale et un système de projection correspondants. Par conséquent, chaque ensemble de données individuel peut devoir être reprojeté dans un système de projection commun et mis à l’échelle à une résolution spatiale uniforme afin que toutes les cellules individuelles des divers ensembles de données soient alignées dans l’espace (Figure 17.8).
Ce qui suit donne un bref aperçu des facteurs scorpan.
Sol (s)
Le facteur s est le deuxième facteur le plus utilisé dans les études de CNS (McBratney et al., 2003). Encore une fois, le facteur s est fondé sur le principe que les sols peuvent être utilisés pour prédire les sols et, par conséquent, qu’il existe de multiples sources à partir desquelles ces données peuvent être acquises: données d’étude de sol conventionnelles, capteurs de sol proximaux et capteurs à distance.
Relevé conventionnel des sols : les cartes pédologiques conventionnelles représentent une mine d’informations dérivées de nombreuses années de travail sur le terrain par les générations précédentes de pédologues; par conséquent, ce sont des sources d’informations extrêmement précieuses qui peuvent être utilisées à des fins de prévision en raison de la relation que différentes variables du sol ont les unes avec les autres. Par exemple, Paul et al. (2020a; 2020b) ont utilisé la zone cartographique des sols de Langley-Vancouver (Luttmerding, 1980) pour générer des couches numériques de pourcentages de sable, de limon et d’argile ainsi que la capacité d’échange cationique; ces estimations ont ensuite été utilisées comme prédicteurs pour cartographier la teneur en carbone organique du sol et la capacité à travailler le sol dans la vallée du bas Fraser, en Colombie-Britannique. Dans les deux études, les prédicteurs générés à partir de l’étude pédologique conventionnelle originale ont été identifiés comme les couches les plus importantes. Bien que les approches d’arpentage des sols soient passées aux techniques numériques, les cartes pédologiques conventionnelles ne doivent pas être ignorées car elles restent une source d’informations précieuses et complémentaires dans le cadre de la CNS.
Capteurs à distance : Les capteurs à distance sont conçus pour prendre des mesures au niveau de la surface de la Terre sans aucun contact physique et sont donc montés sur un avion ou un satellite. Ici, il est important de reconnaître que les données acquises par télédétection pourraient être utilisées pour représenter plusieurs facteurs scorpan. Dans l’éventail de capteurs à distance disponibles, les capteurs spectraux (par exemple, multispectraux, hyperspectraux) qui détectent l’énergie réfléchie ou émise à partir du spectre électromagnétique sont les plus utilisés en CNS (McBratney et al., 2003 ; Mulder et al., 2011). Par exemple, Landsat 8 fournit des mesures pour la lumière visible (par exemple, longueurs d’onde rouge, verte, bleue) et infrarouge (par exemple, proche infrarouge, longueurs d’onde courtes et longueurs d’onde longues). Alternativement, divers capteurs spectraux peuvent également être montés sur un aéronef ou un système aérien télépiloté (SAT) si des données à plus haute résolution spatiale sont requises (Figure 17.9).
Il existe plusieurs problèmes liés à l’utilisation de capteurs spectraux en CNS, d’autant plus que les mesures du sol sont souvent obscurcies par la végétation. De plus, les effets atmosphériques et les distorsions topographiques peuvent provoquer des mesures anormales. De plus, lors de l’utilisation de capteurs spectraux, il faut tenir compte du jour et de l’heure auxquels l’imagerie est prise. Enfin, les télécapteurs n’acquièrent généralement que des données représentatives des sols de surface (5-6 cm ; Adamchuk et al., 2017). Malgré ces problèmes, cependant, dans des conditions de sol nu, les mesures des propriétés spectrales du sol reflètent généralement bien les propriétés du sol telles que la minéralogie, la texture, la matière organique, l’humidité et d’autres propriétés du sol (Mulder et al., 2011).

Capteurs de sol proximaux: Alors que les capteurs à distance sont aériens ou spatiaux, les capteurs proximaux correspondent à un ensemble de capteurs disposés au niveau du sol et conçus pour en mesurer les propriétés qui peuvent être corrélées à d’autres propriétés du sol. Étant donné que les mesures sont prises au sol, les capteurs de sol proximaux peuvent caractériser la variabilité du sol à une résolution spatiale plus fine que les données de télédétection; et par conséquent, ces capteurs sont plus propices à la cartographie des sols à l’échelle du champ. La figure 17.10 montre un véhicule terrestre sans pilote qui a été équipé d’un système de capteur radiométrique gamma.
Parmi les capteurs de sol proximaux, les capteurs à induction électromagnétique (CIE) ont été les chevaux de bataille de la CNS et de la recherche sur l’agriculture de précision (Doolittle et Brevik, 2014). Les CIE mesurent la conductivité électrique apparente (CEa) du sol à plusieurs intervalles de profondeur. Combinées à un système de positionnement global (GPS), les données d’enquête CIE sont souvent utilisées comme prédicteur des propriétés du sol telles que la salinité du sol, la teneur en argile et la teneur en eau; cependant, les attributs secondaires du sol, tels que la densité apparente du sol et le carbone organique du sol, peuvent également être dérivés des mesures de la CEa. Les CIE sont un des nombreux types de capteurs proximaux – d’autres peuvent inclure des capteurs radiométriques gamma, un radar pénétrant dans le sol, ainsi que des capteurs de résistivité électrique (parmi beaucoup d’autres). Les lecteurs intéressés sont encouragés à se référer à Viscarra Rossel et al. (2011) et Adamchuk et al. (2017) pour un aperçu détaillé de ces systèmes.

Climat (c)
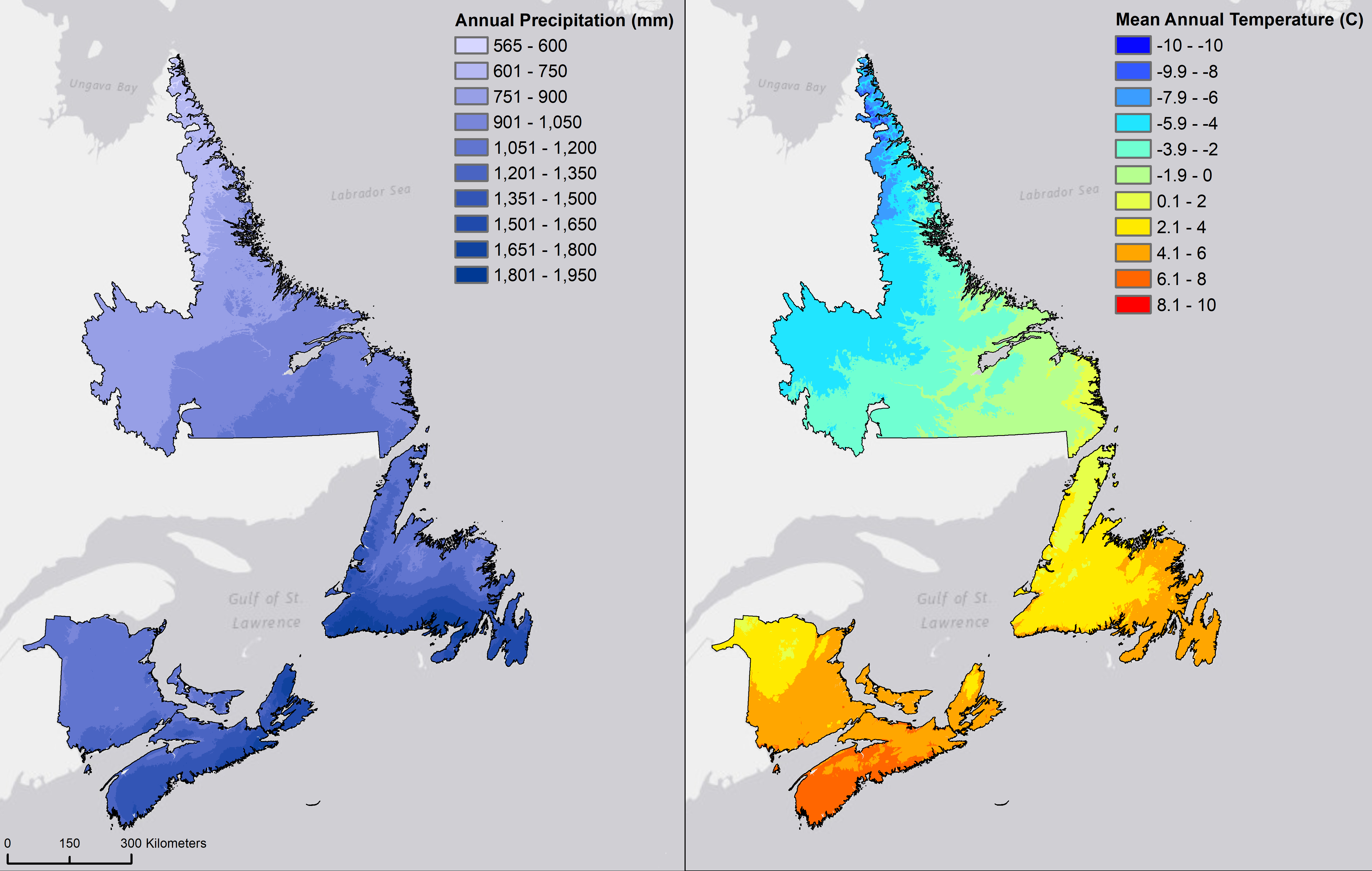
Ce facteur est l’un des facteurs scorpan les moins utilisés (McBratney et al., 2003) – plusieurs explications possibles viennent à l’esprit. Premièrement, le climat local est largement influencé par la topographie et, par conséquent, des indices topographiques tels que l’altitude et l’exposition peuvent être utilisés pour approximer une variable climatique en raison de la relation entre la variation de l’altitude et le taux de changement des conditions environnementales, ainsi que de la relation entre l’exposition de la pente et la température (Schaetzl et Anderson, 2005). Cependant, à mesure que l’étendue de la zone d’étude augmente à l’échelle nationale et mondiale, les modèles climatiques à grande échelle exercent un contrôle important sur diverses propriétés du sol – cela était évident dans le produit mondial SoilGrids250m (Hengl et al., 2017). En termes de couches climatiques, les variables communes comprennent la température annuelle moyenne, les précipitations annuelles moyennes et l’évapotranspiration (McBratney et al., 2003). Ces ensembles de données peuvent provenir de capteurs montés sur des satellites; cependant, les données de modèles climatiques, souvent dérivées de stations météorologiques (par exemple, WorldClim, ClimateNA) peuvent également être utilisées (Figure 17.11). En plus d’utiliser les conditions climatiques actuelles comme entrées dans un modèle, les conditions passées et futures (projetées) pourraient également être utilisées pour simuler les effets des changements de conditions climatiques pour comprendre les patrons de distribution spatiale et temporelle des propriétés du sol.
Organismes (o)
Les images satellitaires, dont on peut extraire de nombreux indices basés sur des rapports de bandes spectrales, représentent une des principales sources de données de végétation pour la CNS (Mulder et al., 2011). La variable la plus couramment utilisée est l’indice de végétation par différence normalisée (NDVI), qui fournit une mesure de la verdeur végétative à partir des longueurs d’onde du proche infrarouge et du rouge tirées de l’imagerie multispectrale. Le NDVI et d’autres données de télédétection telles que l’imagerie thermique se sont également révélés être un prédicteur efficace de l’humidité, de la couleur et de la texture du sol ainsi que de sa capacité de rétention de l’eau; et il est également efficace pour évaluer la croissance des plantes (Figure 17.12 ; Mulder et al., 2011). En plus du NDVI, des indices similaires peuvent inclure l’indice de végétation ajusté au sol (SAVI), le SAVI transformé (TSAVI), le SAVI modifié (MSAVI) et l’indice de surveillance de l’environnement mondial (GEMI). Des études comme Paul et al. (2020) ont révélé l’utilité de ces variables pour cartographier le carbone organique et l’argile du sol dans la vallée du bas Fraser, en Colombie-Britannique; tandis que Heung et al., (2017) ont utilisé des variables similaires pour cartographier les grands groupes de sols de la région d’Okanagan-Kamloops, en Colombie-Britannique. Des indices similaires peuvent également être calculés à l’aide d’images acquises à partir d’un SAT équipé d’un capteur multispectral ou hyperspectral. Bien que ces indices aient été largement utilisés en CNS, les données seront affectées par la saison et l’année de la prise d’images. Si un cartographe des sols a besoin d’informations sur la couverture végétale, les images prises tout au long de la saison de croissance seraient plus utiles que les images post-récolte.

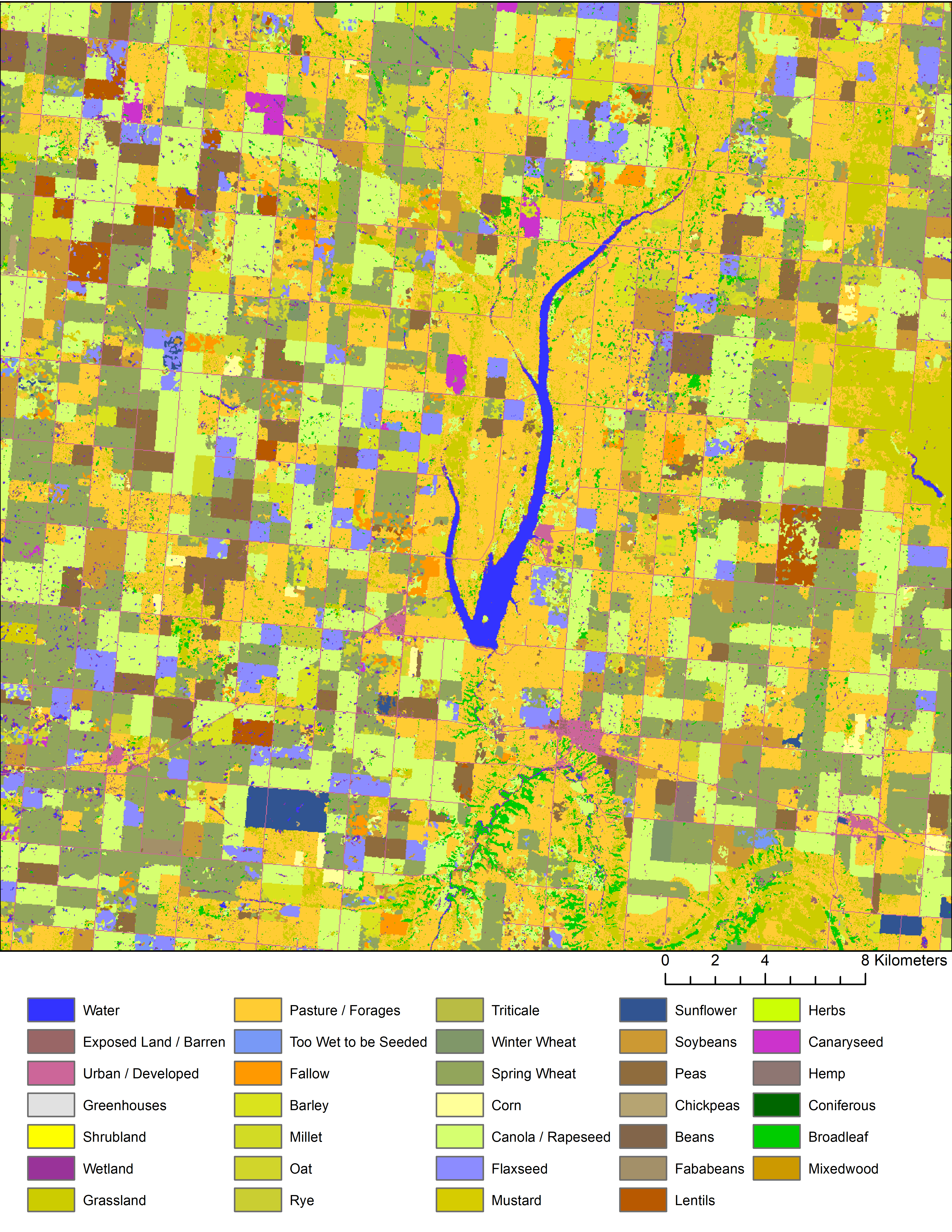
En plus d’utiliser l’imagerie satellitaire brute, les chercheurs du monde entier ont déjà analysé de nombreuses images afin de générer des cartes de la couverture terrestre. Par exemple, le Système de Surveillance des Changements des Terres d’Amérique du Nord (North American Land Change Monitoring System) fournit des cartes de la couverture terrestre pour 2005, 2010 et 2015 à une résolution spatiale de 30 m; au Canada, Agriculture et Agroalimentaire Canada a développé les données de l’inventaire annuel des cultures, qui fournissent des informations sur les cultures à l’échelle nationale depuis 2009 (Figure 17.13). Cependant, il est nécessaire de reconnaître que ces ensembles de données sont générés à l’aide de modèles prédictifs; par conséquent, il est important pour un cartographe des sols de se référer à la documentation à l’appui de ces produits, et de noter leur exactitude.
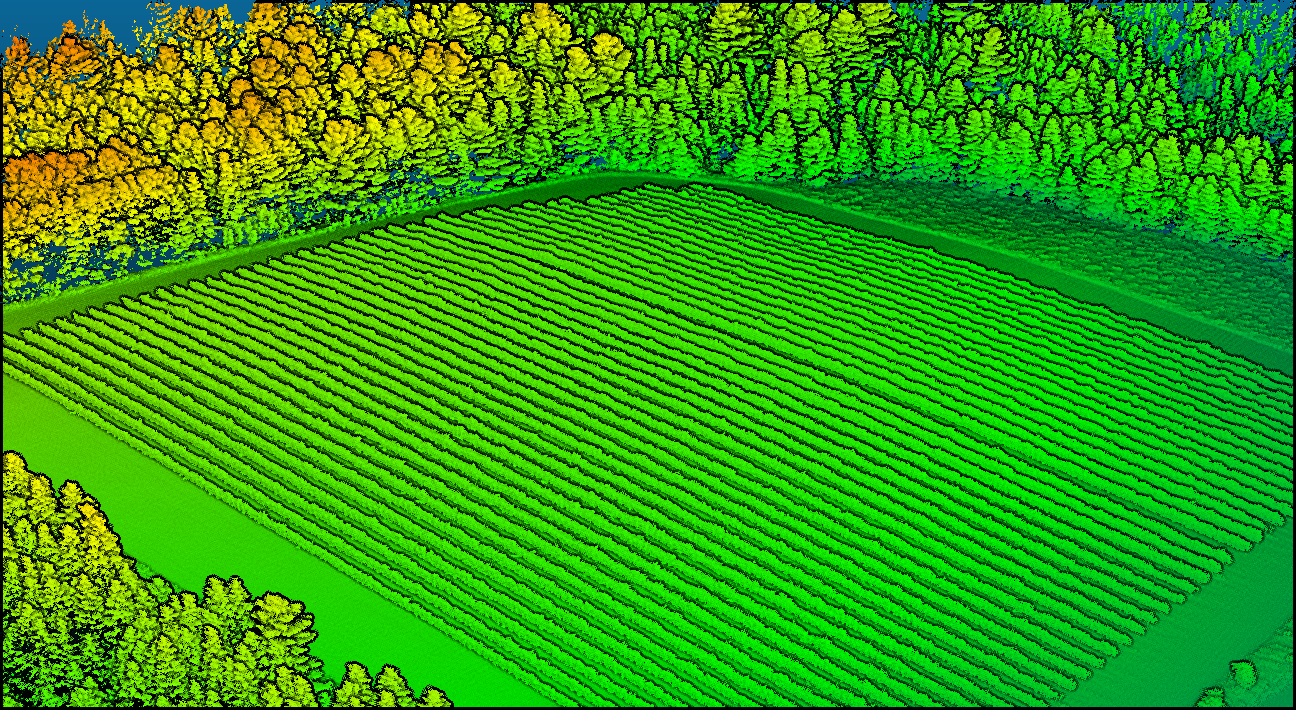
Dans d’autres cas, les données sur les cultures ont également été utilisées comme co-variables pour la prédiction spatiale; par exemple, les rendements des cultures sont le résultat de l’interaction entre les sols, les plantes et l’atmosphère. Par conséquent, les données sur le rendement des cultures peuvent être utilisées comme indicateur des propriétés du sol puisque la croissance des plantes est influencée par des propriétés telles que la teneur en argile, l’humidité et la teneur en éléments nutritifs (Shatar et McBratney, 1999 ; McBratney et al., 2000). Dans un environnement forestier, une opportunité possible peut résider dans l’utilisation de données d’inventaires forestiers où des variables forestières telles que la surface terrière, le volume total brut, la densité du peuplement, la hauteur du peuplement et la biomasse aérienne pourraient donner une estimation des propriétés du sol. En particulier, avec l’évolution des technologies de détection et de télémétrie par la lumière (LiDAR), les données d’inventaires forestiers pourraient devenir des prédicteurs plus couramment utilisés (Woods et al., 2011 ; Treitz et al., 2012). La figure 17.14 montre un modèle numérique de surface qui capture la variabilité de la hauteur des cultures et des arbres à l’aide du LiDAR.
Relief (r)
Il est bien reconnu que le facteur r est le facteur le plus utilisé en CNS (McBratney et al., 2003). L’un des éléments de base de la recherche en CNS a été l’utilisation d’un modèle numérique d’altitude (MNA), un raster composé de valeurs d’altitude. Les MNA peuvent être produits à partir de plusieurs sources: cartes de contour numérisées; interpolés à partir de mesures au sol; et acquis par télédétection à l’aide de capteurs montés sur satellite ou SAT.
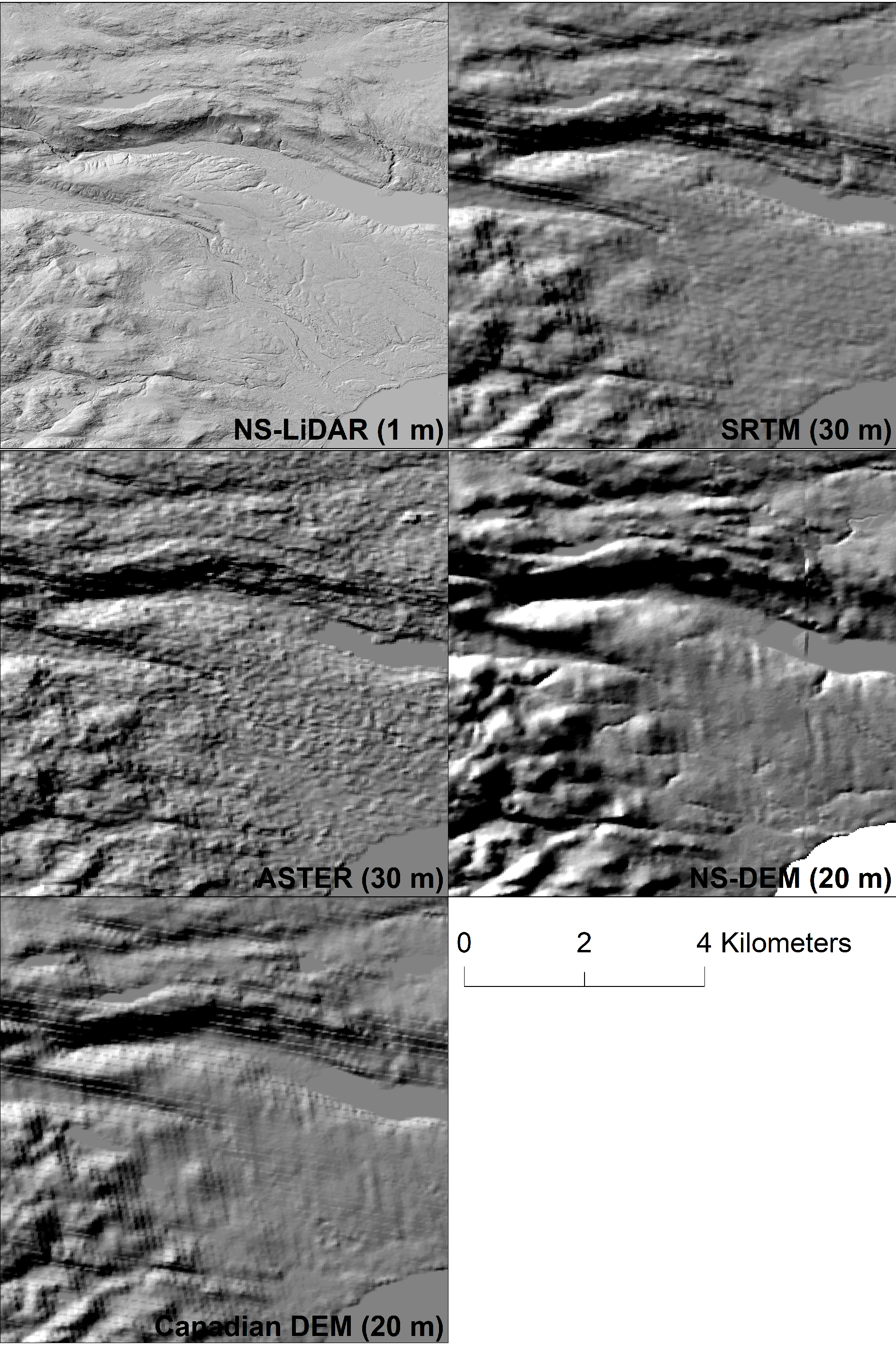
Les MNA sont particulièrement utiles car ils sont facilement disponibles et généralement libres d’accès; par exemple, il existe divers produits MNA provinciaux et fédéraux qui sont accessibles via des portails Web en ligne, et dans les régions du pays où il n’y a pas de données MNA disponibles, des produits MNA mondiaux tels que Shuttle Radar Topography Mission (SRTM) ou Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) est également accessible. En règle générale, avant d’utiliser un MNA, il est toujours important pour un cartographe des sols d’évaluer visuellement le MNA en générant une représentation en ombrage (de type 3D) de la surface topographique (Figure 17.15). Cela aidera le cartographe à évaluer l’abondance et le type d’anomalies du MNA, en raison de la qualité des données brutes et des méthodes utilisées pour générer le MNA; et également si des techniques de prétraitement (par exemple, lissage, remplissage de fosse ou enlèvement de route) doivent être appliquées.
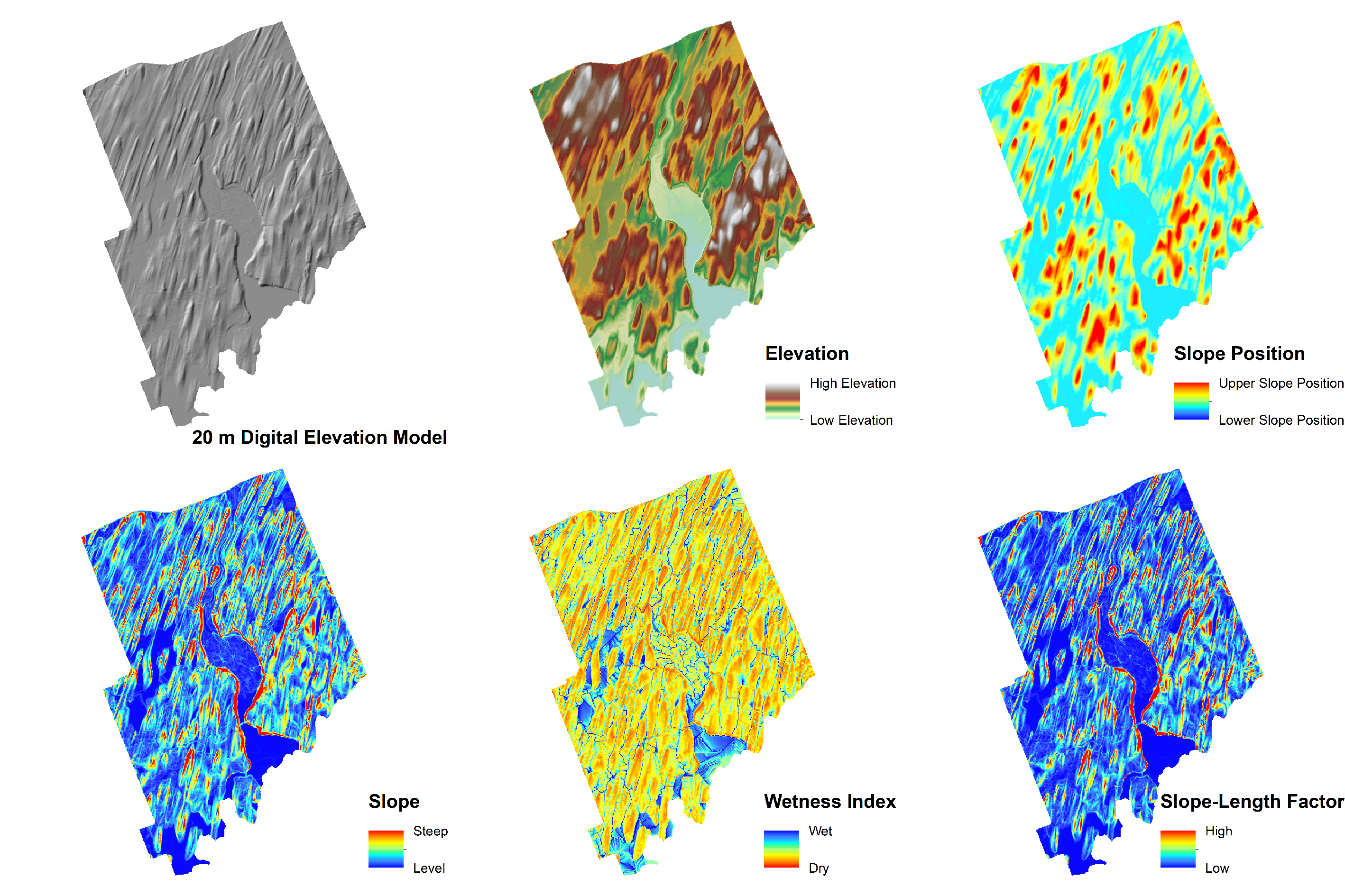
La valeur d’un MNA vient de sa flexibilité dans le calcul d’une large suite de variables topographiques. Par exemple, un MNA peut être utilisé pour caractériser la morphométrie à l’échelle locale (par exemple, la pente, l’aspect, la courbure), la morphométrie à l’échelle du paysage (par exemple, la position relative de la pente) et les modèles hydrologiques (par exemple, l’indice d’humidité topographique) qui ont une influence sur les patrons de distribution des sols (Figure 17.16). En fait, l’analyse de la surface terrestre à l’aide de diverses techniques mathématiques et statistiques, ainsi que le développement de nouvelles variables topographiques font partie de la discipline scientifique connue sous le nom de géomorphométrie.
Au Canada, des MNA de haute qualité ont été utilisés comme base pour cartographier les matériaux parentaux du sol (Heung et al., 2014), les types de sol (Heung et al., 2016) et l’épaisseur du sol (Scarpone et al., 2016) dans toute la Colombie-Britannique ainsi que la profondeur du sol et des classes de texture dans tout l’Ontario (Akumu et al., 2015 ; Akumu et al., 2016). Dans les faits, ces études n’utilisaient généralement que des données dérivées de MNA.
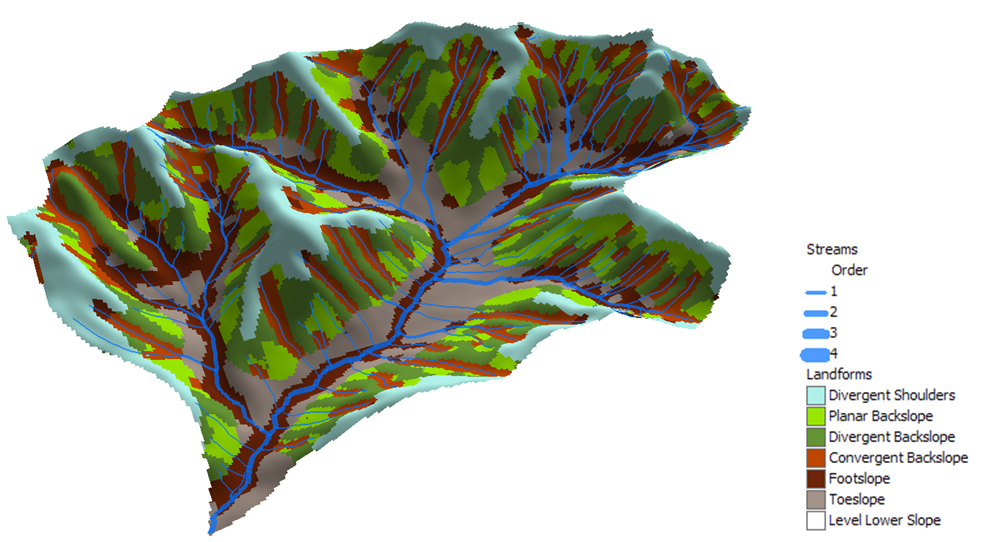
En outre, les variables topographiques peuvent aussi être utilisées pour délimiter les caractéristiques du relief (Figure 17.17). Dans Pennock et al. (1987), des combinaisons de ormes en plan (changement d’aspect) et de courbures de profil (changement de pente) ont été classées en une série de sept éléments de relief (c’est-à-dire, épaulements divergents/convergents; versants divergents/convergents; contreforts divergents/convergents; et surfaces planes) qui caractérisaient les contrôles topographiques sur l’écoulement des sédiments et de l’eau. Par conséquent, de tels schémas de classification du paysage pourraient être appliqués à l’aide d’un MNA (par exemple, MacMillan et al., 2000, 2004) dans une approche semi-automatisée.
Matériau parental (p)
Les informations concernant les matériaux parentaux des sols ont généralement été acquises à partir de cartes géologiques numérisées; par conséquent, ils souffrent des mêmes problèmes spatiaux que les cartes pédologiques conventionnelles où il peut y avoir une combinaison d’unités cartographiques complexes; la quantité de détails est contrôlée par l’échelle cartographique; et les cartes détaillées peuvent avoir une couverture limitée. Par conséquent, le matériau parental du sol est un attribut qui a déjà été cartographié à l’aide d’approches prédictives; par exemple, Heung et al. (2014) ont produit une carte du matériau parental pour la vallée du bas Fraser, en Colombie-Britannique.
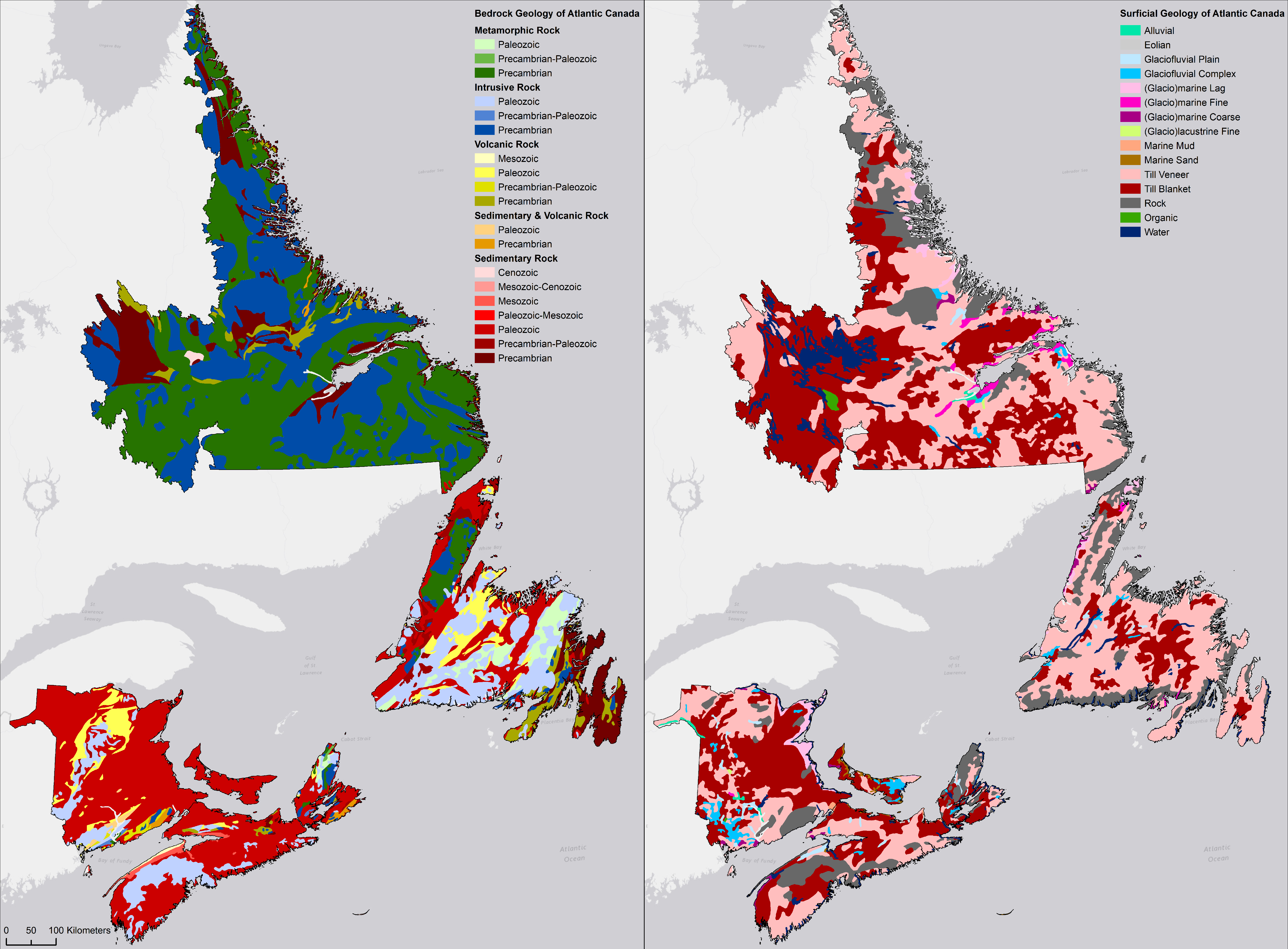
Lors de l’utilisation de cartes géologiques numérisées, il est important de reconnaître la source du matériau à partir duquel le sol est dérivé (Figure 17.18). Par exemple, une carte géologique du substrat rocheux aurait probablement une plus grande utilité dans les environnements non glaciaires où le sol est en grande partie dérivé du substrat rocheux altéré. Cependant, les paysages canadiens sont principalement glaciaires et, par conséquent, les sédiments superposés peuvent avoir des propriétés différentes de celles du substrat rocheux. Par conséquent, une carte de la géologie superficielle serait plus utile car elle caractérise le matériau qui a été transporté et déposé sur le substrat rocheux. Ces efforts de cartographie ont mis en évidence le lien étroit entre la topographie et le matériau parental, en particulier dans les environnements glaciaires, de sorte que des combinaisons d’attributs topographiques sont souvent utilisées pour la CNS comme substitut du matériau parental.
Âge (a)
Le facteur de l’âge peut être utilisé pour estimer depuis combien de temps la pédogenèse a lieu et peut être approximée par l’âge du sol ou du matériau à partir duquel le sol s’est développé (McBratney et al., 2003). En CNS, il existe très peu d’exemples où ces informations ont été utilisées en raison de la difficulté à caractériser l’âge d’un sol dans un format qui serait propice à une utilisation dans un SIG. Une option potentielle pour incorporer le facteur a dans un cadre CNS serait d’incorporer des informations sur la façon dont les humains ont modifié le paysage et ainsi influencé les attributs et les types de sol.
Spatial Position (n)
Le facteur n peut être incorporé de plusieurs manières: en utilisant les coordonnées spatiales des emplacements des échantillons de sol ou en utilisant une couche raster qui représente la distance à un phénomène géographique.
Coordonnées spatiales des échantillons de sol : La prédiction des attributs du sol peut être effectuée en utilisant uniquement les coordonnées spatiales des échantillons de sol eux-mêmes. Ici, nous devrions introduire la première loi de la géographie de Waldo Tobler (Tobler, 1970), qui stipule :
“Tout est lié à tout, mais les choses proches sont plus liées entre elles qu’avec les choses éloignées.”
Lorsque ce principe est appliqué à la CNS, on peut donc dire que deux échantillons de sol proches sont plus susceptibles de partager des propriétés similaires que deux échantillons de sol éloignés l’un de l’autre. Par conséquent, la relation entre l’emplacement de l’échantillonnage, sa valeur de sol correspondante et sa distance aux emplacements d’échantillonnage voisins peut être utilisée pour prédire (c’est-à-dire, interpoler) les valeurs de sol entre ces emplacements à l’aide d’approches géostatistiques. Bien qu’un aperçu de la géostatistique dépasse de loin la portée de ce manuel, les étudiants qui ont suivi un cours d’analyse spatiale sont probablement familiarisés avec les interpolateurs tels que la pondération inverse de la distance et les approches de krigeage.
Au Canada, des approches géostatistiques ont été utilisées pour caractériser la variabilité des sols dès les années 1980. À Raymond, en Alberta, Chang et al. (1988) ont établi une grille de 64 points d’échantillonnage sur un champ agricole de 20 × 25 m pour cartographier la teneur en sable et la salinité du sol en utilisant le krigeage pour faciliter les pratiques d’irrigation sur les sols salins. Dans un système forestier situé dans le sud-ouest de la Colombie-Britannique, Chandler et al. (2008) ont appliqué une approche similaire à l’aide d’un échantillonnage quadrillé et d’un krigeage pour évaluer l’influence d’un érable à grandes feuilles dans un peuplement à dominance de conifères sur les patrons spatiaux de concentration en éléments nutritifs dans l’humus.
Raster basé sur la distance : les informations sur la position spatiale peuvent également être incorporées en calculant la distance ou la proximité de chaque pixel dans la zone d’étude à certains phénomènes géographiques, ou points de référence, afin de capturer des informations contextuelles sur le paysage. Par exemple, en utilisant un réseau de flux, une couche de distance au flux le plus proche peut être calculée; en outre, des couches similaires basées sur la distance peuvent être calculées pour représenter la proximité de l’océan, des lacs, des rivières, des caractéristiques géomorphologiques et de nombreuses autres caractéristiques. Des études telles que Heung et al. (2014) ont constaté que lors de la cartographie des matériaux parentaux du sol pour la vallée du bas Fraser, en Colombie-Britannique, les couches représentant la distance au cours d’eau le plus proche et au fleuve Fraser étaient un important prédicteur de la distribution des matériaux fluviaux.
Échantillonnage du sol
Le fondement des relevés pédologiques repose sur la sélection de sites d’échantillonnage représentatifs. Avec moins de ressources disponibles pour mener à bien de grands programmes d’échantillonnage sur le terrain et les progrès récents des outils informatiques, de nouvelles techniques d’optimisation de la sélection des sites d’échantillonnage sont utilisées pour améliorer la précision des modèles prédictifs tout en gagnant en efficacité dans l’échantillonnage sur le terrain. L’échantillonnage du sol en CNS cherche à recueillir des informations pour comprendre le développement et la distribution des sols tels qu’exprimés par les facteurs pédogénétiques (Jenny, 1941) ou les variables du modèle scorpan (McBratney et al., 2003). À la base, le plan d’échantillonnage cherche à échantillonner tous les facteurs pédogénétiques (c’est-à-dire les covariables) de manière représentative dans la zone géographique d’intérêt; l’hypothèse sous-jacente est que la variabilité spatiale des propriétés du sol prévues peut être expliquée par les covariables environnementales.
Il existe de nombreuses approches de schéma d’échantillonnage, y compris des approches statistiques et géométriques qui cherchent à sélectionner des échantillons de manière aléatoire à partir de tous les emplacements d’échantillonnage possibles (population) ou à répartir les emplacements d’échantillonnage dans l’espace géographique en fonction de la position ou des coordonnées spatiales, et des approches qui utilisent des données auxiliaires pour sélectionner la localisation de l’échantillonnage, communément appelées les approches de l’espace des caractéristiques (feature space approaches en anglais).
Au cœur de chaque plan d’échantillonnage se trouve la question des attributs à mesurer à chaque emplacement sur le terrain. Cette question est étroitement liée à un problème qui était courant pour la cartographie conventionnelle des sols, à savoir le développement de la légende de la carte. Selon le niveau de détail souhaité dans le produit final et les ressources de relevés disponibles, le besoin d’agglomération et de subdivision des classes de sol, les exigences de profondeur pour l’évaluation des propriétés du sol et les méthodes spécifiques d’échantillonnage et d’analyse sur le terrain affectent tous la carte finale et les types d’informations dans l’ensemble des données d’apprentissage. En fin de compte, ces considérations doivent soutenir les objectifs définis initialement pour le projet de CNS.
Les approches géométriques les plus couramment utilisées comprennent l’échantillonnage par grille (GS), l’échantillonnage aléatoire simple (SRS), l’échantillonnage aléatoire stratifié (StRS), l’échantillonnage par transect (TS), l’échantillonnage par grappes (CS) et l’échantillonnage niché (NS). L’échantillonnage par grille divise la zone d’étude en une grille régulièrement espacée avec des emplacements d’échantillonnage situés au centre de chaque grille; la taille de la grille est spécifiée par l’utilisateur en fonction de certains critères, généralement le temps, le budget ou la connaissance préalable de la densité d’échantillonnage requise. L’échantillonnage aléatoire simple crée des sites d’échantillonnage qui sont sélectionnés complètement au hasard (Brus et al., 2011) dans la zone d’étude disponible avec une probabilité égale d’être sélectionnés (Biswas et Zhang, 2018). L’échantillonnage aléatoire stratifié est similaire au SRS à l’exception que la zone est subdivisée en blocs plus petits, appelés strates, et le SRS est appliqué aux strates (Brus et de Gruijter, 1997). La taille des strates peut être utilisée pour pondérer l’échantillonnage, résultant en un échantillonnage proportionnel des strates (Pennock et Yates, 2007). L’échantillonnage par transect est une forme d’échantillonnage par grappes où les échantillons sont sélectionnés à des intervalles de distance égaux le long d’une ligne (de Gruijter et Marsman, 1985). Dans l’échantillonnage en grappes, les emplacements d’échantillonnage sont étroitement regroupés, une technique utilisée pour permettre l’échantillonnage en terrain accidenté et comprenant des zones inaccessibles, sans compromettre la précision (Biswas et Zhang, 2018). L’échantillonnage imbriqué est généralement appliqué en combinaison avec d’autres schémas d’échantillonnage et quantifie la variabilité des données sur différentes distances, un concept issu de la géostatistique. Des exemples de plans d’échantillonnage sont fournis à la figure 17.19.
Les approches basées sur l’espace-objet tiennent compte des valeurs des co-variables environnementales aux emplacements échantillonnés. L’échantillonnage flou des k-moyennes (FKMS) utilise l’algorithme de regroupement des k-moyennes pour minimiser la distance entre les emplacements d’échantillonnage, mais cette distance est dans l’espace co-variable, et non dans l’espace géographique (Brus, 2019). L’échantillonnage latin hypercube conditionné (cLHS) a été proposé par (Minasny et McBratney, 2006) comme une modification de l’échantillonnage latin hypercube (Mckay et al., 1979). Avec de nombreuses co-variables, une expérience factorielle complète est impossible – l’échantillonnage en hypercube latin permet d’échantillonner toutes les co-variables, avec un échantillon par strate (Brus, 2019).
Un schéma d’échantillonnage optimal doit fournir une couverture adéquate à la fois de l’espace géographique et de l’espace des caractéristiques. Cela peut être évalué à l’aide de divers outils. Pour la couverture de l’espace des caractéristiques, une comparaison de la couverture de l’espace des caractéristiques des sites d’échantillonnage et de l’ensemble de la zone d’étude peut généralement être effectuée pour déterminer l’adéquation du schéma d’échantillonnage. Des outils existent pour optimiser l’échantillonnage en termes d’espace géographique et en termes d’espace des caractéristiques, cependant la fusion de ces deux stratégies d’optimisation d’échantillonnage reste un domaine de recherche important. Un aspect qui manque aux stratégies d’échantillonnage existantes est l’information concernant le nombre optimal de sites requis pour optimiser la capacité prédictive d’un modèle utilisé pour la CNS. Les lecteurs intéressés sont encouragés à se référer à Brus et al. (2011) et Biswas & Zhang (2018) pour une introduction plus détaillée aux schémas d’échantillonnage.
Le schéma d’échantillonnage et l’échantillonnage des sols présentent de nombreux défis techniques et logistiques. Lors de la phase de conception de l’échantillonnage, le cartographe doit tenir compte des caractéristiques à éviter lors de la sélection de l’échantillon, en particulier compte tenu de l’utilisation d’algorithmes informatiques, qui ne peuvent pas reconnaître ces contraintes lors de la sélection des sites d’échantillonnage. Par exemple, les caractéristiques anthropiques telles que les routes, les bâtiments, les carrières et les caractéristiques naturelles telles que les plans d’eau présentent généralement peu d’intérêt pour les cartographes des sols et doivent être supprimées des couches d’informations utilisées pour concevoir le schéma d’échantillonnage. De même, dans les terrains difficiles ou les régions éloignées, on peut choisir de restreindre le processus de sélection des échantillons à une distance tampon des routes d’accès. L’accès à des terres privées pour l’échantillonnage du sol peut être difficile. Restreindre l’échantillonnage aux terres publiques est dans la plupart des cas peu pratique et impossible. Il est donc nécessaire d’obtenir l’autorisation des propriétaires fonciers pour effectuer les travaux d’échantillonnage du sol sur le terrain. Un problème qui se pose couramment est le besoin d’un site d’échantillonnage de substitution lorsque l’accès à des terres privées a été refusé. Bien que cela dépasse le cadre de cette introduction à la CNS, les chercheurs développent des stratégies pour modifier et adapter les algorithmes de conception d’échantillons afin de tenir compte de ces types de limites (Clifford et al., 2014; Malone et al., 2019).
Prédiction des classes et des propriétés des sols
L’élaboration d’une carte des sols à l’aide des techniques de CNS nécessite les trois ingrédients suivants :
- une suite de couches environnementales (c’est-à-dire des prédicteurs ou des co-variables) qui représentent les facteurs scorpan;
- des données pédologiques référencées géospatialement; et
- un modèle qui caractérise la relation entre les données pédologiques et l’environnement afin de faire des prédictions pour les emplacements non échantillonnés.
Dans les sections précédentes, nous avons exploré les différentes sources de données environnementales et décrit les différentes approches d’échantillonnage spatial utilisées pour acquérir les données pédologiques. Dans cette section, nous décrivons la procédure à suivre pour créer un jeu de données d’apprentissage, qui est ensuite utilisé pour calibrer un modèle prédictif afin de générer des sorties cartographiques.
En règle générale, les techniques de CNS impliquent une forme d’apprentissage supervisé où un ensemble de données d’apprentissage est d’abord créé en croisant spatialement les emplacements d’échantillonnage (avec les propriétés du sol mesurées) avec la suite sous-jacente de couches environnementales. À l’aide d’un modèle prédictif, la relation entre la variable de réponse du sol et les couches prédictives environnementales est établie grâce à une fonction de classification ou de régression (c’est-à-dire l’ajustement du modèle). Une fois le modèle prédictif ajusté avec les données d’apprentissage, il est ensuite appliqué aux couches environnementales définies pour prédire les propriétés ou les classes du sol aux emplacements non échantillonnés.
Avant de faire des prédictions, le cartographe des sols doit reconnaître le type de données pédologiques à prédire. Les données sur les sols peuvent prendre la forme de données catégorielles ou de données continues, les données catégorielles pouvant être subdivisées en données nominales et en données ordinales. Les données nominales décrivent les aspects qualitatifs du sol et n’ont aucune valeur quantitative; l’exemple le plus courant de données nominales est l’unité taxonomique du sol (par exemple, l’ordre du sol, le grand groupe, la série) mais elles peuvent également inclure la classe de matériau parental du sol, la classe de texture du sol etc. Les données ordinales, un autre type de données catégorielles, représentent des valeurs qui ont des unités ordonnées (c’est-à-dire que les valeurs sont relatives les unes aux autres); elles peuvent par exemple inclure des classes d’humidité du sol et du régime nutritif. Concernant le régime d’humidité du sol, il existe neuf valeurs potentielles allant de 0 à 8, où une valeur de 0 représente des conditions « très xériques » tandis qu’une valeur de 8 représente des conditions « hydriques »; la différence exacte entre les valeurs n’est néanmoins pas connue. En revanche, les données continues représentent les propriétés mesurées du sol telles que la profondeur du sol, le pH du sol, la teneur en argile, le stock de carbone organique du sol etc.
La distinction entre les types de données catégorielles et continues lors de la représentation des informations pédologiques est essentielle car elle détermine en grande partie le choix des modèles prédictifs et des méthodes d’évaluation de leur exactitude et incertitude. Lors de la prédiction de données pédologiques catégorielles, nous sommes limités à l’utilisation d’approches prédictives adaptées à des fins de classification, alors que la prédiction de données continues nécessite l’utilisation d’approches de régressions. Un exemple de carte numérique des sols produite à l’aide d’une approche de modélisation par régressions est illustré à la Figure 17.6 (à droite) pour les prévisions de la teneur en carbone organique du sol. Un exemple utilisant une approche de modélisation par classification est illustré à la Figure 17.20 pour la détermination des grands groupes de sols.
Un aperçu complet des approches de modélisation va bien au-delà de la portée de ce manuel; cependant, les lecteurs intéressés devraient se référer à McBratney et al. (2003), qui donne un aperçu des diverses approches de modélisation par régression et classification à l’aide de techniques d’apprentissages automatiques et géostatistiques. Pour un aperçu détaillé des techniques d’apprentissage automatique utilisées à des fins de classification en CNS, on peut se référer à Heung et al. (2016).
Il est important de réaliser que la CNS et d’autres disciplines utilisent de nombreux types de techniques de modélisation prédictive; il n’y a pas un seul modèle qui surpassera systématiquement un autre ou considéré comme le « meilleur » dans toutes les situations. Le choix des couches de prédicteurs environnementaux, la nature des relations sol-environnement (par exemple, relations linéaires ou non linéaires), la taille de l’ensemble des données d’apprentissage, les propriétés du sol, ainsi qu’une foule d’autres facteurs, peuvent affecter la performance d’un modèle. De plus, les propriétés intrinsèques du modèle, telles que le temps de traitement, la demande de calculs et la complexité du modèle, varient. En conséquence, les praticiens de la CNS sont encouragés à comparer une variété de techniques de modélisation et à évaluer l’exactitude de tous les résultats; en outre, une évaluation visuelle des résultats de la cartographie doit être effectuée par un pédologue qualifié pour s’assurer que les cartes pédologiques créées sont cohérentes avec notre compréhension de la formation et la distribution des sols dans un paysage.
Une grande partie du processus de modélisation peut être effectuée de manière automatisée à l’aide d’un logiciel statistique comme R. L’automatisation facilite grandement les comparaisons de modèles et le processus de comparaison des modèles doit être considéré comme une « meilleure pratique ». Par exemple, dans Heung et al. (2016), des données d’entrée identiques ont été utilisées pour entraîner 11 techniques de modélisation. Malgré des données d’entrées identiques, les résultats fournis par les modèles variaient considérablement lors de la cartographie des grands groupes de sols pour la vallée du bas Fraser, en Colombie-Britannique (figure 17.21).

Évaluation de la précision
Toutes les cartes sont une approximation de la réalité. Les cartes numériques des sols ne seront jamais exactement conformes à ce qu’il y a sur le terrain et tout ce qui est généré à partir des modèles n’est qu’une réalisation parmi un nombre infini de réalisations de cartes pédologiques. Ceci est illustré dans la Figure 17.21, qui montre que différents modèles peuvent générer des cartes pédologiques radicalement différentes. Par conséquent, pour quantifier la qualité des prévisions cartographiques, une évaluation de la précision doit être effectuée sur toutes les prévisions. Ici, nous décrivons le terme de « précision » comme la différence entre les valeurs observées et prédites à un emplacement donné (Brus et al., 2011). Ainsi, la précision est d’autant “plus élevée” que cette différence diminue.
Comme c’est le cas pour la sélection du bon type de modèle pour prédire les variables de sol catégorielles et continues, le choix des bonnes métriques pour évaluer la précision est important. Cependant, dans les deux cas, l’évaluation de la précision doit être effectuée à l’aide d’un ensemble de données indépendantes (c’est-à-dire de validation ou de test) qui n’a pas été utilisé dans la phase d’apprentissage du modèle.
Lors de l’évaluation de la précision des prédictions des variables catégorielles (par exemple les séries de sols, le type de matériau d’origine du sol), nous nous appuyons généralement sur la précision globale et le coefficient kappa de Cohen comme principales mesures. La précision globale est la proportion d’observations qui ont été correctement prédites pour l’ensemble des données indépendantes tandis que le coefficient kappa représente la concordance fortuite entre les classes observées et prédites. Les deux métriques vont de 0 à 1, où une valeur de 1 correspond à la plus haute précision.
Lors de l’évaluation de la précision des prédictions des variables continues (par exemple la densité apparente, la teneur en carbone organique du sol), l’erreur quadratique moyenne (MSE), la racine carrée de l’erreur quadratique moyenne (RMSE), le coefficient de détermination (R2) et le coefficient de corrélation de concordance de Lin (CCC) sont souvent utilisés. La MSE est en fait la différence quadratique moyenne entre les valeurs observées et prédites; la RMSE est simplement la racine carrée de la MSE et est exprimée dans les mêmes unités que la variable du sol. Dans les deux cas, plus la MSE ou la RMSE sont faibles plus un modèle est précis. Le R2 mesure à quel point les valeurs observées et prédites se rapprochent d’une droite de régression la mieux ajustée (c’est-à-dire à quel point les valeurs sont corrélées) et représente la proportion de la variation de la variable du sol expliquée par le modèle. Il est essentiel de noter que le R2 ne reflète pas la précision car il ne tient pas compte du biais du modèle, c’est-à-dire le fait qu’il peut systématiquement surestimer ou sous-estimer une variable de sol. Au lieu de cela, la métrique la plus appropriée consiste à utiliser le CCC, qui représente la qualité de l’ajustement le long d’une ligne à 45° sur un diagramme de dispersion des valeurs observées et prédites. Les valeurs de CCC vont de 0 à 1, où les valeurs de 1 représentent des scénarios où les valeurs prédites correspondent aux valeurs observées et indiquent ainsi une exactitude et une précision des prédiction élevées.
INCERTITUDE DES CARTES NUMÉRIQUES DES SOLS
Il est important de reconnaître qu’avec toutes les activités de modélisation environnementale, les modèles ne sont que des représentations abstraites du monde réel et qu’il existe des incertitudes quant aux véritables propriétés du sol. La façon dont nous présentons les modèles de sol sur une carte pédologique est basée sur un modèle prédictif, qui n’est jamais vraiment exempt d’erreurs; par conséquent, l’estimation quantitative de l’incertitude des cartes numériques des sols est tout aussi importante que sa validation, car elle permettra aux utilisateurs d’évaluer l’utilité des cartes et la manière dont ces cartes peuvent être utilisées (Heuvelink, 1998). Les incertitudes s’accumulent et se propagent par le biais de trois sources: la propriété mesurée du sol, les prédicteurs environnementaux représentant les facteurs scorpan et le modèle prédictif.
Incertitude dans les propriétés du sol : Il y a toujours des différences entre les techniques analytiques qui sont utilisées pour analyser les échantillons de sols. Ces différences peuvent conduire à des erreurs lors de la mesure de diverses propriétés du sol. Dans certaines situations, les variables de réponse du sol peuvent être déduites d’autres variables du sol qui sont plus faciles à mesurer à l’aide de fonctions de pédo-transfert grâce auxquelles les erreurs peuvent se propager davantage. Des incertitudes peuvent également survenir lors de l’enregistrement de l’emplacement spatial des points d’échantillonnage par GPS, certains GPS étant plus précis que d’autres.
Incertitude des prédicteurs environnementaux : Il existe une incertitude inhérente aux prédicteurs environnementaux eux-mêmes. Par exemple, des incertitudes verticales peuvent être présentes avec les MNA ainsi que l’incertitude de mesure des capteurs de sol distaux et proximaux. Lors de l’utilisation de cartes pédologiques conventionnelles ou de cartes géologiques au format polygone, la composition du polygone, les limites du polygone et l’échelle de la carte peuvent toutes contribuer à l’incertitude.
Incertitude dans le modèle prédictif : Comme indiqué précédemment, le choix du modèle prédictif peut entraîner des cartes de sol radicalement différentes; par conséquent, la structure du modèle peut être une autre source d’incertitude. Les relations entre les prédicteurs environnementaux et les propriétés du sol peuvent être linéaires, non linéaires ou une combinaison des deux, et certains types de modèles sont plus efficaces que d’autres pour saisir ces relations. Par exemple, un modèle linéaire simple serait efficace pour modéliser les relations linéaires, tandis que les approches de modélisation non linéaires (par exemple les arbres de classification et de régression) sont efficaces pour capturer les relations hiérarchiques non linéaires. Enfin, certaines approches de modélisation (par exemple les arbres de modèles) sont un hybride de modèles linéaires et non linéaires et sont donc capables de capturer les deux types de relations.
Idéalement, toutes les cartes numériques des sols devraient être accompagnées de cartes d’incertitude, qui illustrent l’incertitude pour chaque pixel individuel – mais en pratique, c’est rarement le cas. En raison de l’importance de reconnaître l’incertitude dans les résultats du modèle, les normes de cartographie internationales (par exemple, GlobalSoilMap.net) exigent souvent l’inclusion d’une carte d’intervalles de prédiction de 90 % ainsi que les limites de prédiction inférieure (5 %) et supérieure (95 %) (Figure 17.22). Ici, nous supposons qu’avec un niveau de confiance de 90 %, la valeur réelle d’une propriété du sol se situera dans l’intervalle de prédiction. Par conséquent, lors de l’interprétation de ces cartes d’incertitude, cette dernière augmente avec la largeur de l’intervalle de prédiction de 90 %. Il convient de noter que cette représentation de l’incertitude ne s’applique qu’aux variables continues du sol.
Lors de la représentation de l’incertitude pour les prédictions de variables catégorielles du sol, des cartes de probabilité de classe sont utilisées pour calculer l’incertitude pour chaque pixel. Ici, un ensemble de rasters de probabilité est produit pour chaque classe, chaque pixel ayant une valeur correspondante qui représente la probabilité que cette classe se produise (figure 17.23). Si une classe individuelle a une forte probabilité d’occurrence, l’incertitude est faible; cependant, si toutes les classes ont une probabilité d’occurrence égale, l’incertitude est élevée. Bien que de nombreuses mesures puissent être calculées à partir de ces rasters de probabilité de classe (par exemple l’incertitude d’ignorance, l’incertitude d’exagération, l’indice de confusion), elles caractérisent toutes efficacement la répartition des valeurs de probabilité entre les différentes classes (figure 17.24).

AU-DELÀ DE LA CARTOGRAPHIE NUMÉRIQUE DES SOLS
Beaucoup d’efforts ont été déployés pour améliorer l’accessibilité, l’interprétabilité, la compréhension et la communication de l’information sur les sols à destination des utilisateurs de données dans certaines provinces. Des applications en ligne, comme l’Outil de Recherche d’Information sur les Sols de la Colombie-Britannique (SIFT), l’Atlas des Ressources des Terres Agricoles de l’Alberta , le Système d’Information sur les Sols de la Saskatchewan (SKSIS), Info-Sols (Québec) et l’Atlas d’Information Agricole de l’Ontario, tirent parti des anciennes cartes pédologiques et fournissent une interface utilisateur graphique grâce à laquelle un utilisateur peut facilement interroger ces cartes et acquérir des informations relatives aux propriétés du sol ainsi que des informations interprétées sur le sol, y compris la capacité des terres agricoles et le risque d’érosion des sols.
D’autres plateformes, telles que SOILx, ont exploré l’utilisation de la réalité augmentée pour visualiser les profils de sol sur un appareil mobile. Ces plateformes ont le potentiel d’améliorer les processus décisionnels, de faciliter les évaluations d’impact environnemental et de fournir des informations sur la gestion durable des sols aux utilisateurs. Cependant, ces plateformes sont limitées par la qualité des informations sur les sols qu’elles contiennent et la capacité de l’utilisateur à comprendre ces informations.
Traditionnellement, les cartographes des sols se sont concentrés sur le développement de méthodes quantitatives pour prédire la distribution des sols dans l’espace. Cependant, l’autre rôle critique d’un cartographe des sols, qui a reçu beaucoup moins d’attention, est celui de « générateur et fournisseur de connaissances » et de comprendre comment les informations sur les sols peuvent être utilisées pour éclairer la prise de décisions et la planification des ressources (Finke, 2012). Le rôle du cartographe des sols est d’interpréter, en collaboration avec des experts du domaine (par exemple des agronomes, des forestiers, des scientifiques de l’environnement, des ingénieurs), les différentes cartes numériques des sols et de développer des outils d’interprétation qui évaluent les menaces et les fonctions des sols et facilitent le processus de prise de décision. Par exemple, une carte des risques d’érosion du sol est probablement plus utile à un décideur que des cartes individuelles des propriétés du sol (par exemple des cartes de matière organique et de texture du sol) et d’autres couches de données environnementales (par exemple des cartes de pente et de précipitations).
Une grande partie de la discipline de la pédométrie est consacrée à l’utilisation de cartes numériques des sols comme outil d’évaluation des fonctions et des menaces des sols. Ce domaine de recherche actif est appelé évaluation numérique des sols (ENS). Bien que les détails de l’ENS sortent du cadre de ce chapitre, les lecteurs intéressés peuvent se référer à Carré et al. (2007), qui a initié ce domaine d’activité, et Finke (2012), qui en discute ensuite la portée. À l’échelle mondiale, des progrès considérables ont été accomplis dans le développement d’outils d’évaluation des sols à l’aide de cartes numériques des sols.
Applications de l’information numérique sur les sols
Les applications peuvent inclure mais ne sont pas limitées à :
- Cartographier les zones de gestion pour les applications d’engrais et d’irrigation à taux variable (Fleming et al., 2000)
- Évaluer le potentiel agricole des terres à l’échelle régionale (Harms et al., 2015 ; Kidd et al., 2015)
- Estimer les marges brutes potentielles pour des cultures spécifiques (Kidd et al., 2015)
- Évaluer l’érosion des sols à l’échelle nationale (Panagos et al., 2015)
- Évaluer le potentiel de séquestration du carbone dans les sols (Angers et al., 2011 ; Akpa et al., 2016)
- Aider à fournir des assurances spécifiques aux sites et aux sols pour gérer les menaces sur le sol (Cook et al., 2008)
- Évaluer l’exposition humaine aux contaminants du sol (Caudeville et al., 2012)
- Caractériser les régions viticoles (terrons et terroir) à partir des informations sur le climat et les sols (Carré et al., 2005 ; Coggins et al., 2019)
- Élaborer des cartes d’écosites pour les plans de gestion forestière au niveau des peuplements (Yang et al., 2017)
- Cartographier des indices de santé des sols à l’échelle du paysage (Svoray et al., 2015)
- Audits et surveillance du carbone organique du sol à l’échelle de l’exploitation (de Gruijter et al., 2016 ; Malone et al., 2018)
Pouvez-vous creuser!
Le Groupe de Travail Canadien sur la Cartographie Numérique des Sols (GTCCNS)

Au cours des 20 dernières années, la communauté des sciences du sol est passée de la prédominance des arpenteurs-géomètres gouvernementaux et des scientifiques universitaires à une communauté où les scientifiques ayant une expertise du sol travaillent dans tous les secteurs publics et privés (par exemple l’agriculture, la foresterie, l’environnement) et dans les diverses régions du paysage canadien. Malheureusement, cela a conduit à la décentralisation et à la dispersion des informations sur les sols ainsi que de l’expertise en cartographie des sols.
En réponse à cela, un développement majeur dans le paysage national de la cartographie des sols a été la création du Groupe de travail canadien sur la cartographie numériques des sols (GTCCNS), un réseau scientifique national composé de chercheurs de plusieurs établissements universitaires, de ministères fédéraux et d’organismes provinciaux. Afin de fournir un mécanisme et une plateforme permettant aux cartographes des sols de collaborer à l’échelle nationale, le Comité de pédologie de la Société canadienne des sciences du sol (CSSS) a créé le GTCCNS en 2016. Ce réseau de recherche pancanadien et intersectoriel est chargé de coordonner les initiatives de CNS à l’échelle nationale, la diffusion d’informations numériques sur les sols et l’animation d’ateliers éducatifs.
Par exemple, la communauté a développé les cartes du carbone des sols du Canada pour les soumettre au projet mondial de cartographie du carbone de la FAO. Tous les produits développés par le GTCCNS sont conçus pour répondre aux normes de CNS internationales de GlobalSoilMap.net et de l’Organisation des Nations Unies pour l’alimentation et l’agriculture (FAO). À ce jour, le GTCCNS a rempli son mandat avec succès; il a joué un rôle déterminant dans l’élaboration et la livraison d’une carte canadienne préliminaire du carbone organique des sols (carte CSOC) dans le cadre de la contribution du Canada à la carte mondiale du carbone organique des sols (carte GSOC) compilée par le Groupe technique intergouvernemental sur les sols de la FAO en 2017 (FAO et Groupe technique intergouvernemental sur les sols, 2018). Les bénévoles dévoués au projet ont clairement démontré la capacité du réseau à communiquer et à collaborer efficacement dans la tâche ardue de développer la carte du CSOC.
De plus, les membres du GTCCNS se consacrent également à la formation de la prochaine génération de cartographes numériques des sols et ont offert de nombreux ateliers à travers le pays. Les participants à l’atelier comprenaient des étudiants de premier cycle et des cycles supérieurs, des chercheurs universitaires et gouvernementaux et des participants de l’industrie.
EXERCISES DE PENSÉE
- Faites un remue-méninge sur la manière dont les cartes numériques des sols peuvent être utilisées pour résoudre des problèmes de gestion de l’environnement et des ressources à l’échelle locale (par exemple des champs agricoles individuels ou des peuplements forestiers), à l’échelle régionale (par exemple des provinces individuelles) et à l’échelle nationale (par exemple du Canada).
- Les données numériques sur les sols sont de plus en plus disponibles au Canada. Veuillez prendre le temps d’explorer les ressources suivantes et de réfléchir aux avantages et aux défis de la cartographie numérique des sols : British Columbia Soil Information Finder Tool; Saskatchewan Soil Information System; et Ontario AgMaps Geographic Information Portal. Les ressources internationales disponibles incluent: Australian Soil Resource Information System, et SoilGrids.
RÉFÉRENCES
Adamchuk, V., Allred, B., Doolittle, J., Grote, K., and Viscarra Rossel, R. 2017. Chapter 6: Tools for proximal soil sensing. In Soil Survey Manual, Soil Science Division Staff. Agricultural Handbook No. 18, United States Department of Agriculture, pp. 355-394.
Angers, D.A., Arrouays, D., Saby, N.P.A., and Walter C. 2011. Estimating and mapping the carbon saturation deficit of French agricultural topsoils. Soil Use Manage. 27: 448-452.
Akpa, S.I.C., Odeh, I.O.A., Bishop, T.F.A., Hartemink, A.E., and Amapu, I.Y. 2016. Total soil organic carbon and carbon sequestration potential in Nigeria. Geoderma 271: 202-215.
Akumu, C.E., Johnson, J.A., Ethreidge, D., Uhlig, P., Woods, M., Pitt, D.G., and McMurray, S. 2015. GIS-fuzzy logic based approach in modeling soil texture: Using parts of the Clay Belt and Hornepayne region in Ontario Canada as a case study. Geoderma 239-240: 13-24.
Akumu, C.E., Woods, M., Johnson, J.A., Pitt, D.G., Uhlig, P., and McMurray, S. 2016. GIS-fuzzy logic technique in modeling soil depth classes: Using parts of the Clay Belt and Hornepayne region in Ontario, Canada as a case study. Geoderma 283: 78-87.
Arrouays, D., Grundy, M.G., Hartemink, A.E., Hempel, J.W., Heuvelink, G.B.M., Hong, S.Y., Lagacherie, P., Lelyk, G., McBratney, A.B., McKenzie, N.J., Mendonça -Santos, M.L., Minasny, B., Montanarella, L., Odeh, I.O.A., Sanchez, P.A., Thompson, J.A., and Zhang, G-L., 2014. GlobalSoilMap: Toward a fine-resolution global grid of soil properties. Adv. Agron. 125: 93-134.
Beckett, P.H.T. 1971. The cost-effectiveness of soil survey. Outlook Agr. 6: 191-198.
Bie, S.W., Ulph, A., and Beckett, P.H.T. 1973. Calculating the economic benefits of soil survey. J. Soil Sci. 24: 429-435.
Biswas, A., and Zhang, Y. 2018. Sampling Designs for Validating Digital Soil Maps: A Review. Pedosphere 28: 1–15.
Brus, D.J., and de Gruijter, J.J. 1997. Random sampling or geostatistical modelling? Choosing between design-based and model-based sampling strategies for soil (with discussion). Geoderma 80: 1–44.
Brus, D.J., Kempen, B., and Heuvelink, G.B.M. 2011. Sampling for validation of digital soil maps. Eur. J. Soil Sci. 62: 394-407.
Brus, D.J. 2019. Sampling for digital soil mapping: A tutorial supported by R scripts. Geoderma 338: 464–480.
Canada Soil Survey Committee, 1978. The Canadian System of Soil Classification. 1st ed. Research Branch, Canadian Department of Agriculture.
Carré, F., and McBratney, A.B. 2005. Digital terron mapping. Geoderma 128: 340-353.
Carré, F., McBratney, A.B., Mayr, T., and Montanarella, L. 2007. Digital soil assessments: Beyond DSM. Geoderma 142: 69-79.
Caudeville, J., Goovaerts, P., Carré, F., Bonnard, R., Arrouays, D., Cicolella, A., Jolivet, C.C., Saby, N.P.A., and Boudet, C. 2012. Spatial modeling of human exposure to soil contamination – an example of digital soil assessment. In Digital Soil Assessments and Beyond, CRC Press.
Chandler, J.R., Schmidt, M.G., and Dragicevic, S. 2008. Spatial patterns of forest floor properties and litterfall amounts associated with bigleaf maple in conifer forest of southwestern British Columbia. Can. J. Soil Sci 88: 295-313.
Chang, C., Sommerfeldt, T.G., and Entz, T. 1988. Soil salinity and sand content variability determined by two statistical methods in an irrigated saline soil. Can. J. Soil Sci. 68: 209-221.
Clifford, D., Payne, J.E., Pringle, M.J., Searle, R., and Butler, N. 2014. Pragmatic soil survey design using flexible Latin hypercube sampling. Computers and Geosciences. 67: 62-68.
Coen, G.M. (ed.) 1987. Soil survey handbook. Volume 1. Technical Bulletin 1987-9E. Land Resource Research Center. Research Branch. Agriculture Canada. Edmonton, Alberta. 135pp.
Coggins, S., Malone, B.P., Stockmann, U., Possell, M., and McBratney, A.B. 2019. Towards meaningful geographical indication: Validating terroirs on 200 km2 scale in Australia’s lower Hunter Valley. Geoderma Reg. 15: e00209.
Cook, S.E., Jarvis, A., and Gonzalez, J.P. 2008. A new global demand for digital soil information. In Digital Soil Mapping with Limited Data. Springer, 31-41.
de Gruijter, J.J., and Marsman, B.A. 1985. Transect sampling for reliable information on mapping units. Pages 150–165 in D.R. Nielsen and J. Bouma, eds. Soil spatial variability: proceedings of a workshop of the ISSS and the SSSA, Las Vegas, USA, 30 Nov. – 1 Dec. 1984.
de Gruijter, J.J., McBratney, A.B., Minasny, B., Wheeler, I., Malone, B.P., and Stockmann, U. 2016. Farm-scale soil carbon auditing. Geoderma 265: 120-130.
Dewitte, O., Jones, A., Spaargaren, O., Breuning-Madsen, H., Brossard, M., Dampha, A., Deckers, J., Gallali, T., Hallett, S., Jones, R., Kilasara, M., le Roux, P., Michéli, E., Montanarella, L., Thiombiano, L., van Ranst, E., Yemefack, M., and Zougmore, R. 2013. Harmonisation of the soil map of Africa at the continental scale. Geoderma 211-212: 138-153.
Doolittle, J.A., and Brevik, E.C. 2014. The use of electromagnetic induction techniques in soils studies. Geoderma 223-224: 33-45.
FAO and Global Soil Partnership, 2016. Global Soil Partnership Pillar 4 Implementation Plan: Towards a Global Soil Information System. Pillar 4 Working Group, 38 pp.
FAO and Intergovernmental Technical Panel on Soils. 2018. Global Soil Organic Carbon Map (GSOCmap) Technical Report. Rome, 162 pp.
Finke, P.A. 2012. On digital soil assessments with models and the Pedometrics agenda. Geoderma 171-172: 3-35.
Fleming, K.L., Westfall, D.G., Wiens, D.W., and Brodahl, M.C. 2000. Evaluating farmer defined management zone maps for variable rate fertilizer application. Precis. Agric. 2: 201-215.
Fulton, R.J. 1995. Surficial Materials of Canada. Geological Survey of Canada, Natural Resources Canada, “A” Series Map 1880A.
Harms, B., Brough, D., Philip, S., Bartley, R., Clifford, D., Thomas, M., Willis, R., and Gregory, L. 2015. Digital soil assessment for regional agricultural land evaluation. Glob. Food Sec. 5: 25-36.
Hengl, T., de Jesus, J.M., Heuvelink, G.B.M., Gonzalex, M.R., Kilibarda, M., Blagotić, Shangguan, W., Wright, M.N., Geng, X., Bauer-Marschallinger, B., Guevara, M.A., Vargas, R., MacMillan, R.A., Batjes, N.H., Leenaars, J.G.B., Ribeiro, E., Wheeler, I., Mantel, S., and Kempen, B. 2017. SoilGrids250m: Global gridded soil information based on machine learning. PLoS ONE 12: e0167948.
Heung, B., Bulmer, C.E., and Schmidt, M.G. 2014. Predictive soil parent material mapping at a regional-scale: A Random Forest approach. Geoderma 214-215: 141-154.
Heung, B., Hodúl, M., and Schmidt, M.G. 2017. Comparing the use of legacy soil pits and soil survey polygons as training data for mapping soil classes. Geoderma 290: 51-68.
Heung, B., Zhang, J., Ho, H.C., Knudby, A., Bulmer, C.E., and Schmidt, M.G. 2016. An overview and comparison of machine-learning techniques for classification purposes in digital soil mapping. Geoderma 265: 62-77.
Heuvelink, G.B.M., 1998. Error Propagation in Environmental Modelling with GIS. CRC Press.
Hole, F.D. 1978. An approach to landscape analysis with emphasis on soils. Geoderma 21: 1-23.
Hole, F.D., and Campbell, J.B. 1985. Soil Landscape Analysis. Rowman and Allanheld, Totowa, NJ.
Jenny, H. 1941. Factors of Soil Formation: A System of Quantitative Pedology. McGraw-Hill, NY.
Kidd, D., Webb, M., Malone, B., Minasny, B., McBratney, A. 2015. Digital soil assessment of agricultural suitability, versatility and capital in Tasmania, Australia. Geoderma Reg. 6: 7-21.
Kienast-Brown, S., Libohova, Z., Boettinger, J. 2017. Digital soil mapping. In C. Ditzler, K. Scheffe, and H.C. Monger (eds.) Soil survey manual, USDA Handbook 18, Government Printing Office, Washington, D.C., pp. 295–354. https://www.nrcs.usda.gov/wps/portal/nrcs/detail/soils/ref/?cid=nrcs142p2_054261
Luttmerding, H.A. 1980. Soils of the Langley-Vancouver Map Area. Report No. 15, British Columbia Soil Survey. BC Ministry of Environment, Kelowna, BC, Canada.
MacMillan, R.A., Nikiforuk, L., Fawcett, M.D., Whitson, I.R., McNeil, R.L. and Turchenek, L.W. 1992. Soil mapping systems; Alberta Research Council, ARC/AGS Open File Report 1992-22, 238 p. https://ags.aer.ca/publications/OFR_1992_22.html
MacMillan, R.A., Pettapiece, W.W., Nolan, S.C., and Goddard, T.W. 2000. A generic procedure for automatically segmenting landforms into landform elements using DEMs, heuristic rules and fuzzy logic. Fuzzy Sets and Systems 113: 81–109,
MacMillan, R.A., Jones, K., and McNabb, D.H., T.W. 2004.Defining a hierarchy of spatial entities for environmental analysis and modeling using digital elevation models (DEMs). Computers, Environment and Urban Systems 28(3): 175-200.
Malone, B., Hedley, C., Roudier, O., Minasny, B., Jones, E., and McBratney, A.B. 2018. Auditing on-farm soil carbon stocks using downscaled national mapping products: Examples from Australia and New Zealand. Geoderma Reg. 13: 1-14.
Malone, B.P., Minansy, B., and Brungard, C. 2019. Some methods to improve the utility of conditioned Latin hypercube sampling. PeerJ 7, e6451.
Mapping Systems Working Group. 1981. A soil mapping system for Canada: revised. Land Resource Research Institute, Contribution No. 142. Agriculture Canada, Ottawa, 94 pp. http://sis.agr.gc.ca/cansis/publications/manuals/1981-smsc/81-142-soil-mapping.pdf
McBratney, A.B., Mendonça-Santos, M.L., and Minasny, B. 2003. On digital soil mapping. Geoderma 117: 3-52.
McBratney, A.B., Odeh, I.O.A., Bishop, T.F.A., Dunbar, M.S., and Shatar, T.M. 2000. An overview of pedometric techniques for use in soil survey. Geoderma 97: 293-327.
Mckay, M.D., Beckman, R.J., and Conover, W.J. 1979. A Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output From a Computer Code. Technometrics 42: 55–61.
McKeague, J. A. and Stobbe, P.C. 1978. History of soil survey in Canada 1914-1975. Research Branch, Canada Department of Agriculture, Ottawa, ON. Historical Series No. 11.
McKenzie, N., and Ryan, P. 1999. Spatial prediction of soil properties using environmental correlation. Geoderma 89: 67-94.
Minasny, B., and McBratney, A.B. 2006. A conditioned Latin hypercube method for sampling in the presence of ancillary information. Comput. Geosci. 32: 1378–1388.
Minasny, B., and McBratney, A.B. 2016. Digital soil mapping: A brief history and some lessons. Geoderma, 264: 301-31.
Mulder, V.L., De Bruin, S., Shaepman, M.E., and Mayr, T.R. 2011. The use of remote sensing in soil and terrain mapping – a review. Geoderma 162: 1-19.
Panagos, P., Borrelli, P., Poesen, J., Ballabio, C., Lugato, E., Meusburger, K., Montanarella, L., and Alewell, C. 2015. The new assessment of soil loss by water erosion in Europe. Environ. Sci. Policy 54: 438-447.
Paul, S.S., Coops, N.C., Johnson, M.S., Krzic, M., Chandna, A., and Smukler, S.M. 2020a. Mapping soil organic carbon and clay using remote sensing to predict soil workability for enhanced climate change adaptation. Geoderma 363: 114177.
Paul, S.S., Dowell, L., Coops, N.C., Johnson, M.S., Krzic, M., Geesing, D., Smukler, S.M. 2020b. Tracking changes in soil organic carbon across the heterogeneous agricultural landscape of the Lower Fraser Valley of British Columbia. Sci. Total Environ. 732: 138994.
Pennock, D.J., Zebarth, B.J., and DeJong, E. (1987) Landform classification and soil distribution in hummocky terrain, Saskatchewan, Canada. Geoderma, 40: 297-315.
Pennock, D., and Yates, T. 2007. Soil sampling designs. Pages 1–14 in M.R. Carter and E.G. Gregorich, eds. Soil sampling and methods of analysis, Second Edition.
Rossiter, D.G. 2018. Past, present & future of information technology in pedometrics. Geoderma 324: 131-137.
Sanchez, P.A., Ahamed, S., Carré, F., Hartemink, A.E., Hempel, J., Huising, J., Lagacherie, P., McBratney, A.B., McKenzie, N.J., Mendoça-Santos, M.L., Minasny, B., Montanarella, L., Okoth, P., Palm, C.A., Sachs, J.D., Shepherd, K.D., Vâgen, T-G., Vanlauwe, B., Walsh, M.G., Winowiecki, L.A., and Zhang, G-L. 2009. Digital soil map of the world. Science 325: 680-681.
Scarpone, C., Schmidt, M.G., Bulmer, C.E., and Knudby, A. 2016. Modelling soil thickness in the critical zone for Southern British Columbia. Geoderma 282: 59-69.
Schaetzl, R.J., Anderson, S., 2005. Soils: Genesis and Geomorphology. Cambridge University Press.
Scull, P., Franklin, J., Chadwick, O.A., and McArthur, D. 2003. Predictive soil mapping: A review. Prog. Phys. Geog. 27: 171-197.
Shatar, T.M., and McBratney, A.B. 1999. Empirical modeling of relationships between sorghum yield and soil properties. Precis. Agric. 1: 249-276.
Soil Survey Staff, 1975. Soil Taxonomy. A Basic System of Soil Classification for Making and Interpreting Soil Surveys. 2nd ed. U.S. Government Print Office, Washington, DC.
Svoray, T., Hassid, I., Atkinson, P.M., Moebius-Clune, B.N., and van Es, H.M. 2015. Mapping soil health over large agriculturally important areas. Soil Sci. Soc. Am. J. 79: 1420-1434.
Thompson, J.A., Nauman, T.W., Odgers, N.P., Libohova, Z., and Hempel, J.W. 2012. Harmonization of legacy soil maps in North America: Status, trends, and implications for digital soil mapping efforts. In Digital Soil Assessments and Beyond. CRC Press, Leiden, Netherlands, pp. 97-102.
Tobler, W. 1970. A computer movie simulating urban growth in the Detroit region. Economic Geography 46:230-240.
Treitz, P., Lim, K., Woods, M., Pitt, D., Nesbitt, D., and Etheridge, D. 2012. LiDAR sampling density for forest resource inventories in Ontario, Canada. Remote Sens. 4: 830-848.
Viscarra Rossel, R.A., Adamchuk, V.I., Sudduth, K.A., McKenzie, N.J., and Lobsey, C. 2011. Proximal soil sensing: An effective approach for soil measurements in space and time. Adv. Agron. 113: 243-291.
Webster, R. 1994. The development of pedometrics. Geoderma 62: 1-15.
Webster, R., and Burrough, P.A. 1972a. Computer-based soil mapping of small areas from sample data – I: Multivariate classification and ordination. J. Soil Sci. 23: 210-221.
Webster, R., and Burrough, P.A. 1972b. Computer-based soil mapping of small areas from sample data – II: Classification smoothing. J. Soil Sci. 23: 222-234.
Wheeler, J.O., Hoffman, P.F., Card, K.D., Davidson, A., Sanfrd, B.V., Okulitch, A.V. and Roest, W.R. 1996. Geological Map of Canada. Geological Survey of Canada, Natural Resources Canada, “A” Series Map 1860A.
Woods, M., Pitt, D., Penner, M., Lim, K., Nesbitt, D., Etheridge, D., and Treitz, P. 2011. Operational implementation of LiDAR inventory in Boreal Ontario. Forest Chron. 87: 512-528.
Yang, Q., Meng, F.-R., Bourque, C.P.-A., and Zhao, Z. 2017. Production of high-resolution forest-ecosite maps based on model predictions of soil moisture and nutrient regimes over a large forested area. Sci. Rep. 7: 10998.
Zhu, A.X., and Band, L.E. 1994. A knowledge-based approach to data integration for soil mapping. Can. J. Remote Sens. 20: 408-418.
À propos des auteurs
Brandon Heung, Professeur adjoint, Département des Sciences Végétales, Alimentaires et Environnementales, Faculté d’Agriculture, Université Dalhousie

Le Dr Brandon Heung est professeur adjoint en sciences du sol et en systèmes d’information géographique (SIG) au Département des sciences végétales, alimentaires et environnementales. Ses recherches portent sur le domaine de la pédométrie, une sous-discipline de la science du sol qui intègre la pédologie, les SIG, la télédétection, les statistiques spatiales et l’apprentissage automatique pour mieux comprendre les modèles spatiaux et temporels du sol. Il a développé des cartes numériques des sols pour des applications dans l’agriculture et les systèmes forestiers et il s’intéresse également à comprendre comment les modèles numériques prédictifs des sols peuvent être utilisés pour faire face aux changements climatiques et aux problèmes de sécurité alimentaire.
Daniel D. Saurette, Ministère de l’Agriculture, de l’Alimentation et des Affaires Rurales de l’Ontario; École des Sciences Environnementales, Collège d’Agriculture de l’Ontario, Université de Guelph

Mon travail se concentre sur l’étude, la cartographie et la classification des sols. On peut me considérer soit comme un pédologue, soit comme un géomètre. Mon travail consiste à planifier des campagnes sur le terrain pour décrire les profils de sol, les classer, échantillonner le sol pour en déterminer les propriétés chimiques et physiques en laboratoire, puis interpréter les données pour développer des cartes de sol. Traditionnellement, cela se faisait à l’aide de photos aériennes, mais plus récemment, la discipline s’est déplacée vers la cartographie numérique prédictive des sols, où nous tirons parti de la puissance de l’apprentissage automatique et des systèmes d’information géographique (SIG) pour créer des cartes numériques des sols à haute résolution.
Chuck E. Bulmer, Ministère des Forêts, Terres et des Opérations sur les Ressources Naturelles et le Développement Rural de la Colombie-Britannique

Mon travail consiste à effectuer des recherches sur l’inventaire et la conservation des sols et à fournir des conseils aux décideurs de la Colombie-Britannique concernant les questions de gestion des ressources du sol. Les sujets d’intérêt pour les gestionnaires comprennent le reboisement, les impacts de la gestion forestière sur la productivité du sol et les processus du sol affectant notre réponse au cycle du carbone et au changement climatique. Les gestionnaires forestiers ont besoin d’informations scientifiques pour prendre de bonnes décisions dans ces domaines et mon rôle en tant que pédologue chercheur est de mener des recherches visant à développer ces informations pour la Colombie-Britannique et à les transmettre aux gestionnaires.
